I received a DPS5020 module yesterday, well packed. This is the 0-50V/0-20A Lab PSU module I mentioned earlier. Assembling and switching this on was straight forward, and using it was a very positive surprise. I was initially concerned about it’s HMI, but I am actually impressed by the cleverness of this design.

This first picture (sorry for the quality) show what you receive. A small user manual, cables and the two main modules. What surprised me a little is actually how small this is, but I need to remind everyone that you need a 6-60V DC supply in front here. I applied 30V and get an output from 0-29V. The HMI sence the input and adjust on Voltage range accordingly. I will see if I can do the same on current (manually set upper limit)
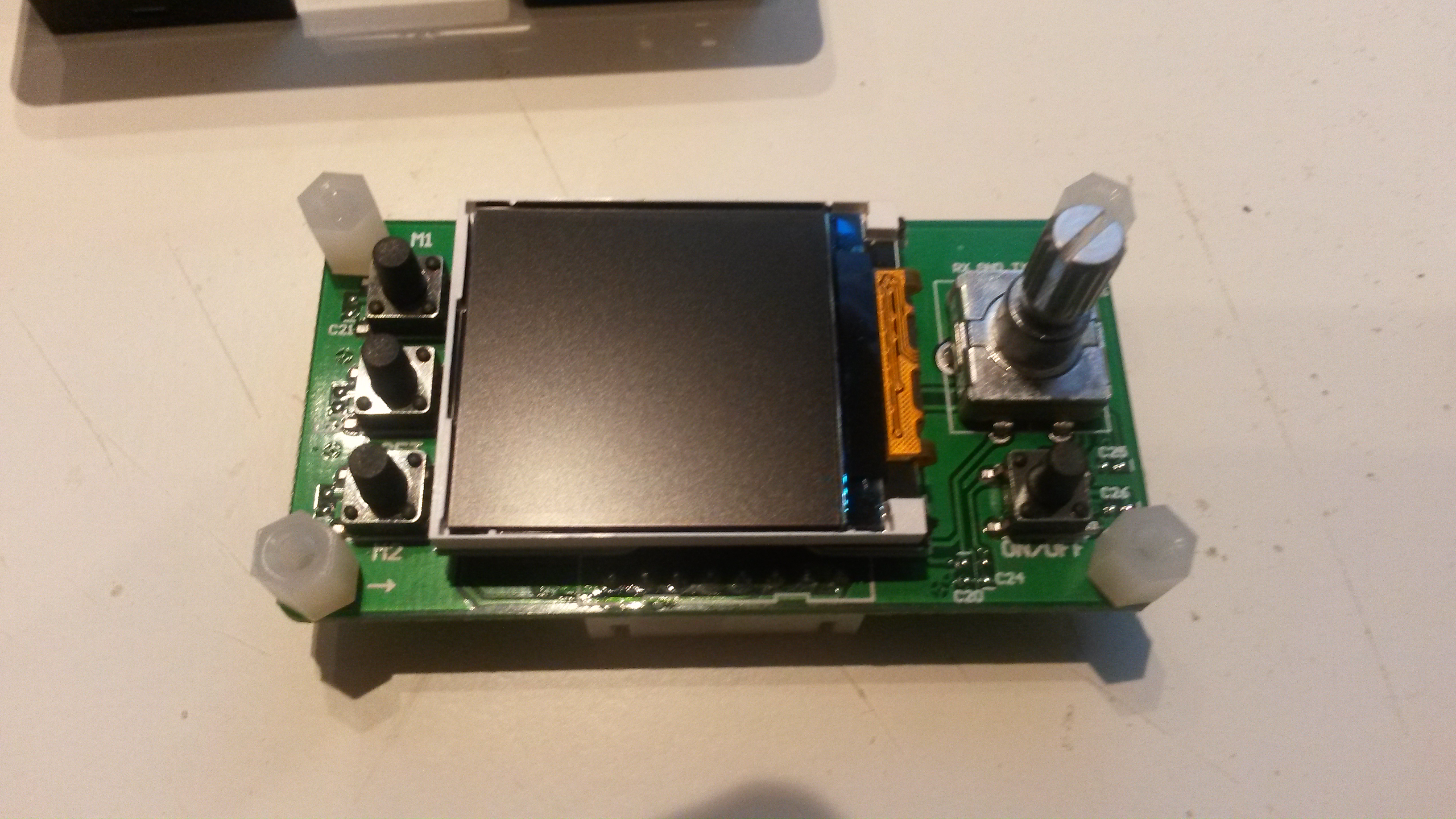 This picture show the HMI module opened up. The display is small, but sufficient. The entire module is quite simple and could easily be replaced with some hacking – it has a separate LCD and Keys cable, but I have no info about their pins jet. My initial plan was to replace this, but after having used it a little I am not so sure I actually want to.
This picture show the HMI module opened up. The display is small, but sufficient. The entire module is quite simple and could easily be replaced with some hacking – it has a separate LCD and Keys cable, but I have no info about their pins jet. My initial plan was to replace this, but after having used it a little I am not so sure I actually want to.

This is a picture (from the net) showing the HMI in use. The Green/Yellow/Purple text in the middle is showing actual output. On bottom (cyan) you see voltage in, on top(cyan) you see Voltage and Current setting. Notice that Voltage out show actual voltage out, not the intended setting. You will actually see a +/- 0.01 variance in this.
Operating this is straight forward – press V and turn the knob to set Voltage, Press A and turn the knob to set Current limit. Once you are done you press Set and get a confirm screen. After that you press the On/Off to enable this out. This took me by surprise because it is not just about turning the knob to change voltage – you actually have to press V button first. This is very good because it is nice to know that your PSU don’t change by accident. You can adjust voltage both on-line and off-line this way. The second issue is the capability to adjust setting before you enable it out. The knob is a standard encoder with a push switch used to change what digit you adjust. Seriously it took me around 60 seconds to learn this interface. This is far, far better than I actually expected.
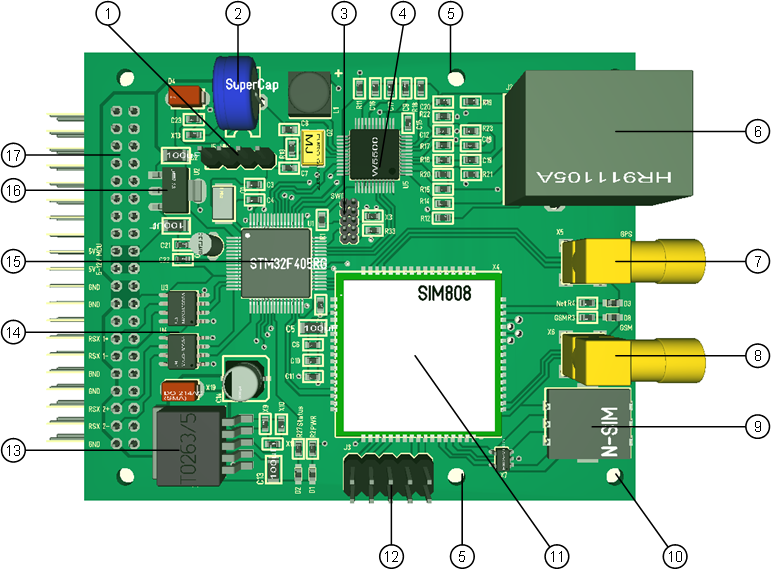
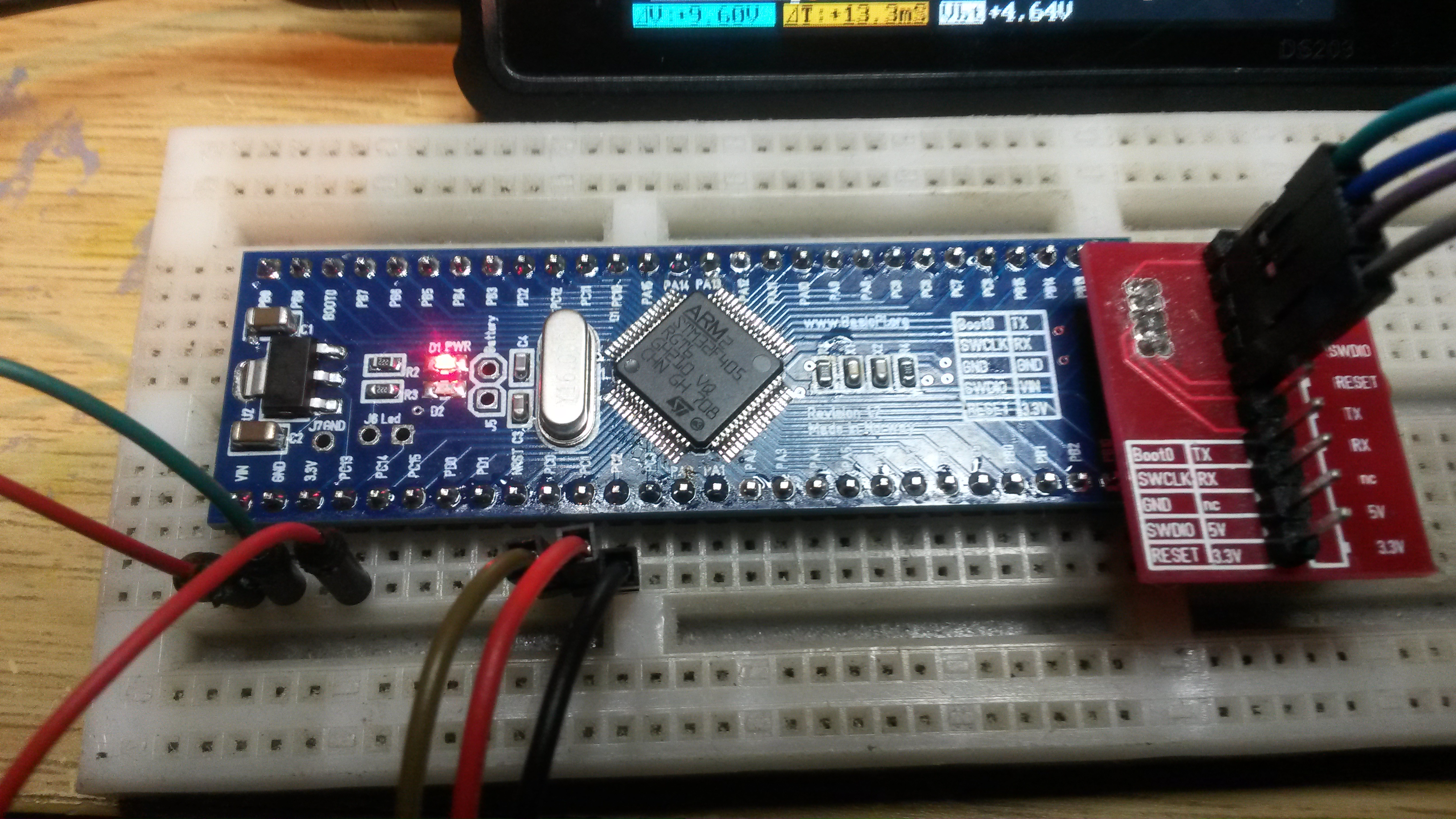
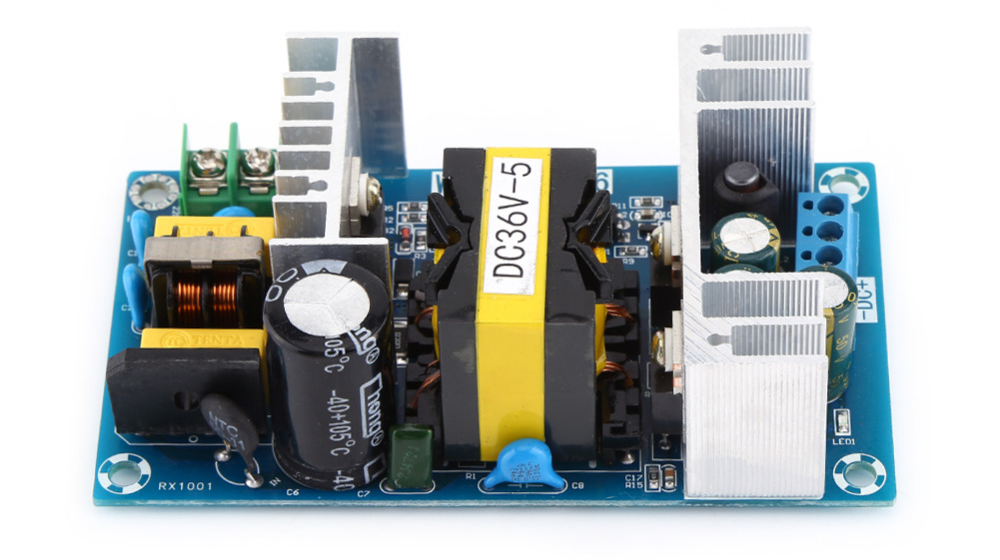
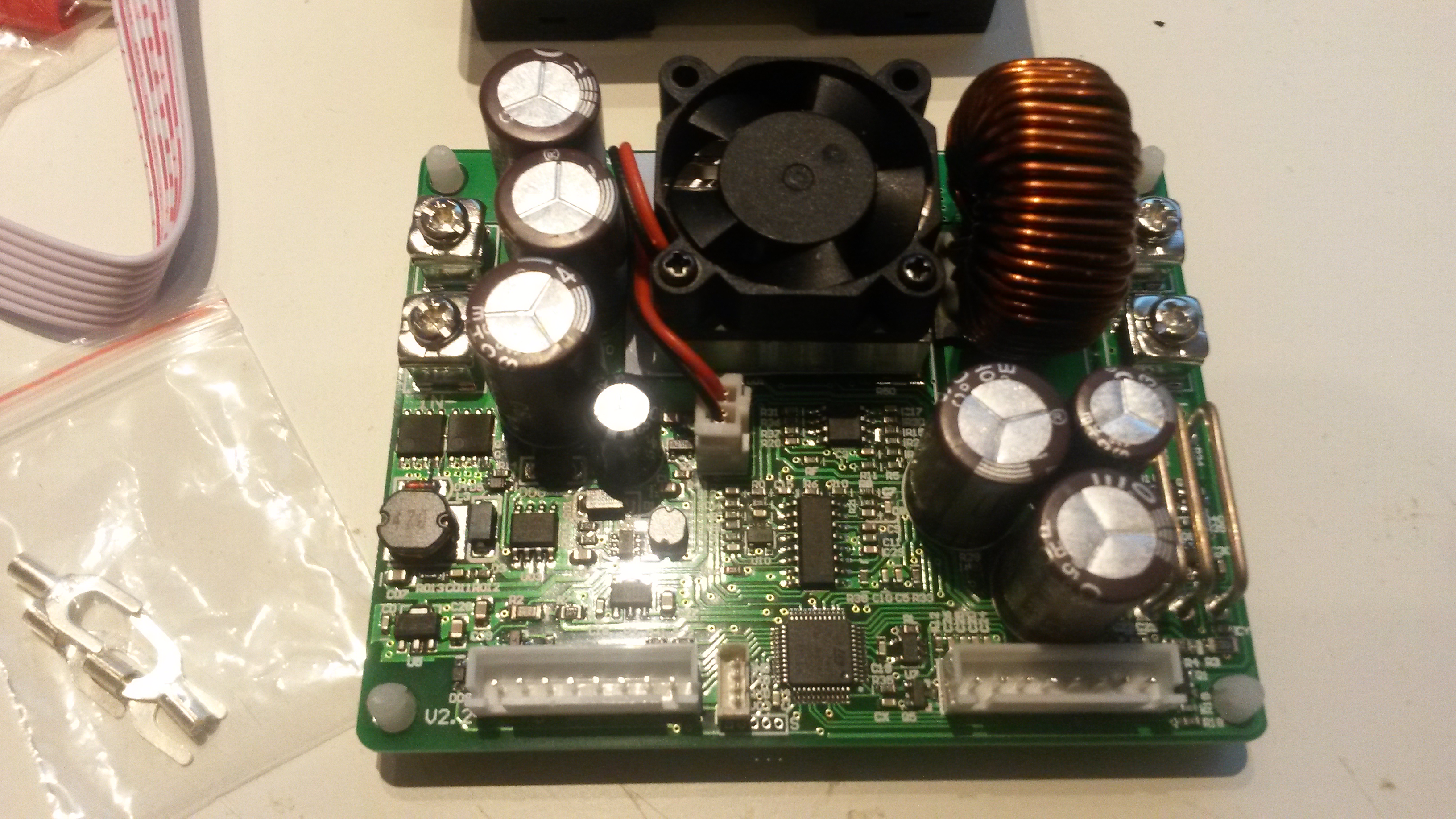 This is the PSU module itself (above). Input at left, output at right. On the front you see a LQFP48 holding a STM32F100C8. I ordered the USB which is a familiar CH340G operating on an UART. That is the small 4 pin connector next to the MCU. I will get back to using this, but it basically means you can remotely connect to this using USB, Bluetooth or simply hacking the UART. I believe the protocol is described.
This is the PSU module itself (above). Input at left, output at right. On the front you see a LQFP48 holding a STM32F100C8. I ordered the USB which is a familiar CH340G operating on an UART. That is the small 4 pin connector next to the MCU. I will get back to using this, but it basically means you can remotely connect to this using USB, Bluetooth or simply hacking the UART. I believe the protocol is described.
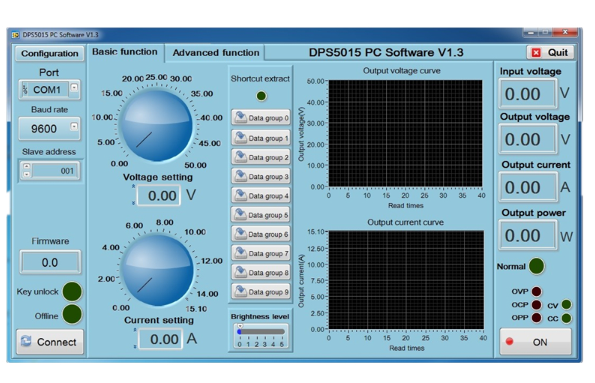
This is the included top-side HMI that can be used to operate this from a PC. I have yet to test this. You need to downoad this from their site – this pic is actually from the 15A module. My comment here is that this is all fine, but I need my PC screens for different purposes. I would however like the graphs, so I am considering hacking the UART and connect a Graph display on the PSU + adding Ethernet/Wifi capabilities.
Next I will get some load tests done to see how this wonder behave under heavy usage. Not bad for 45.- USD P&P included. Transport was under 3 weeks, but this is only pure luck.
 – we have some awesome Lab PSU’s coming up. DPS5020 do have a small fan, but it has been silent so far.
– we have some awesome Lab PSU’s coming up. DPS5020 do have a small fan, but it has been silent so far.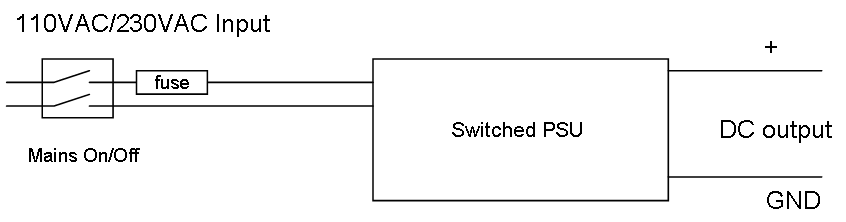
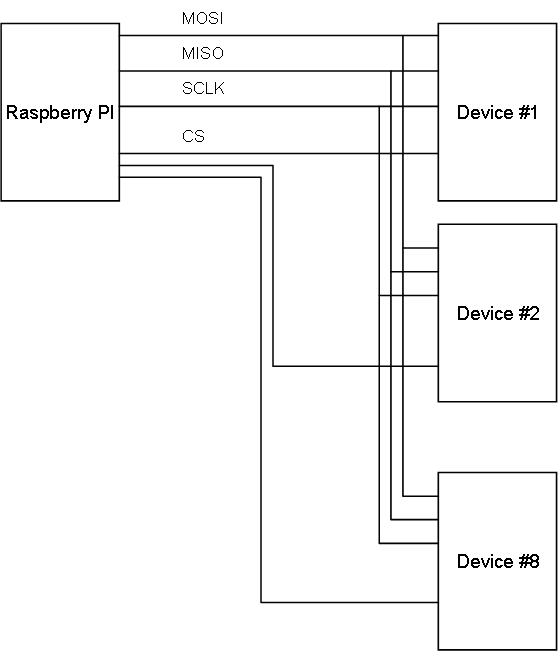
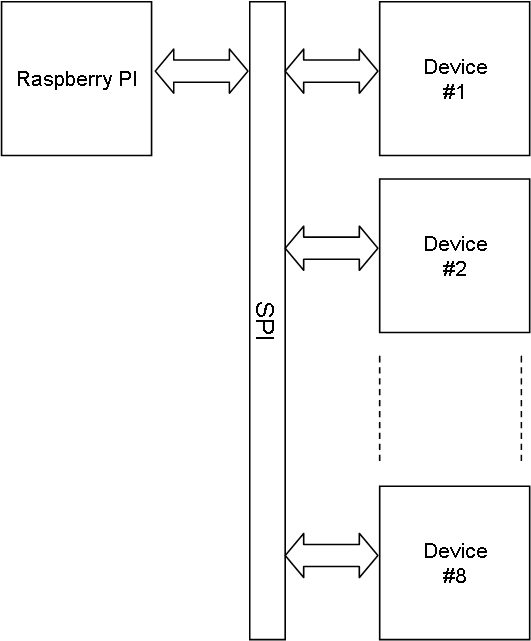 I need a specialized SPI driver to support the Smart SPI concept. The block diagram above show the logical view with device to device communication, while the diagram below show the physical design. Just to remind everyone – in the logical concept we communicate device to device. In the physical this is done by a device sending a message to RPI that send it to the addressed device.
I need a specialized SPI driver to support the Smart SPI concept. The block diagram above show the logical view with device to device communication, while the diagram below show the physical design. Just to remind everyone – in the logical concept we communicate device to device. In the physical this is done by a device sending a message to RPI that send it to the addressed device.