This litle Servo about 3 x 3cm is far from a wimp as far at current usage goes. A single Servo have no problem dragging a 10A PSU down – actually I think it’s the current regulation that is predictive, meaning it drops out because current raise is to fast – but, anyway – the only PSU I have that can manage this is a 80A battery.
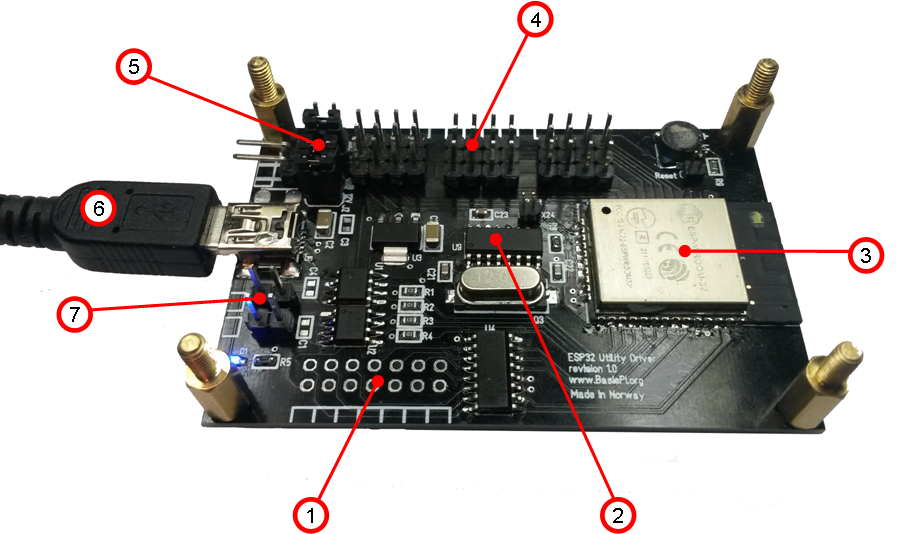
I connecting 4 of these to my ESP32 Utility Driver and some of my dodgy wires burned up.
Looking at the scope I observe a small Voltage drop as the Signals pulse in. As I add servo’s it become worse. I think I need to alter my algorithm a little to spread the pulses out in time and avoid 12 servos that pulse at the exact same time. I also think I need to buy a 6V battery and ditch the 12V to 5V regulator as it most likely is this that dip a bit.
The ESP32 Utility Deriver does however work well. I am a bit puzled over my DPS5005 PSU’s. They seem to use a predictive aproach to regulating current.