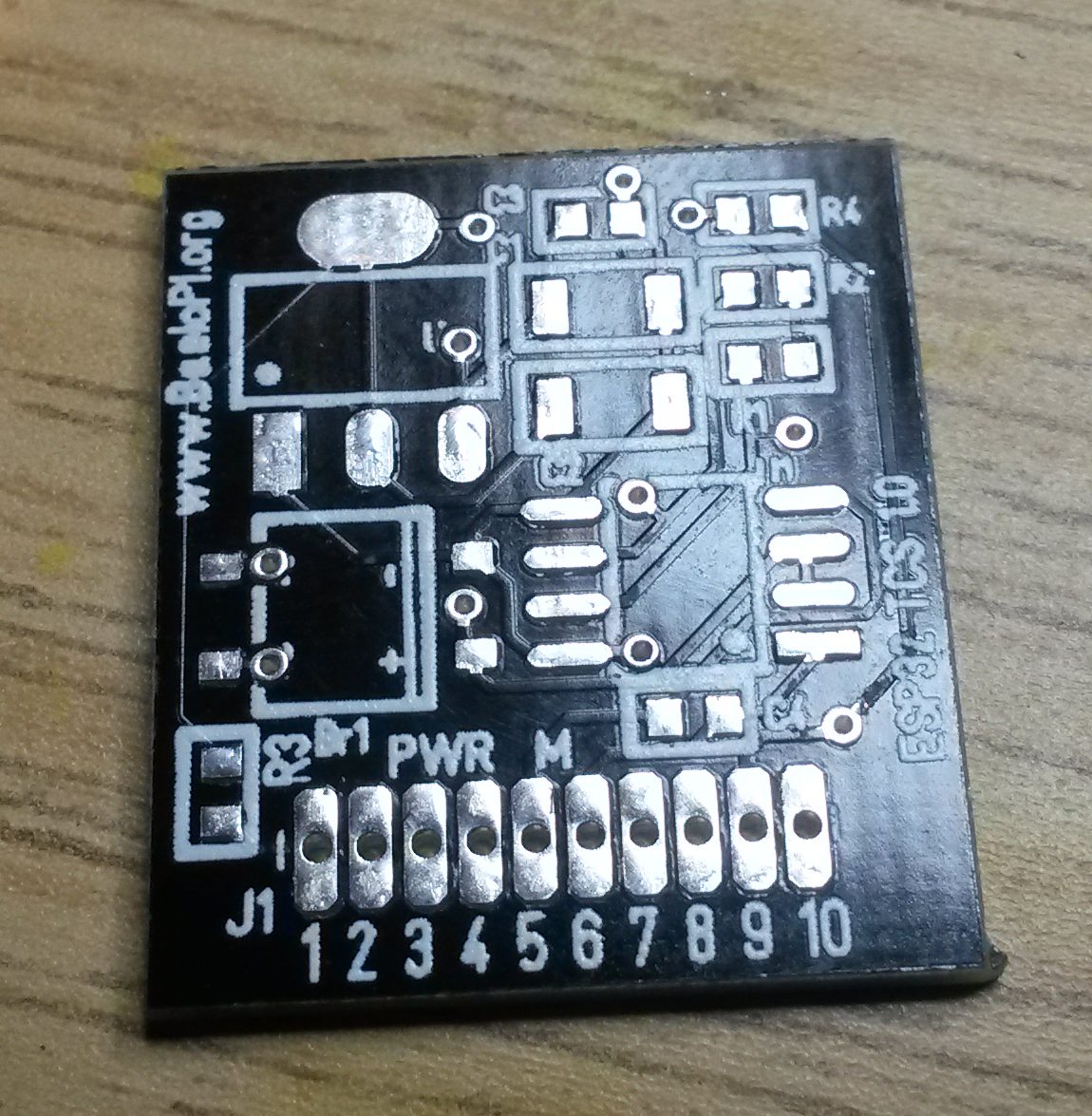
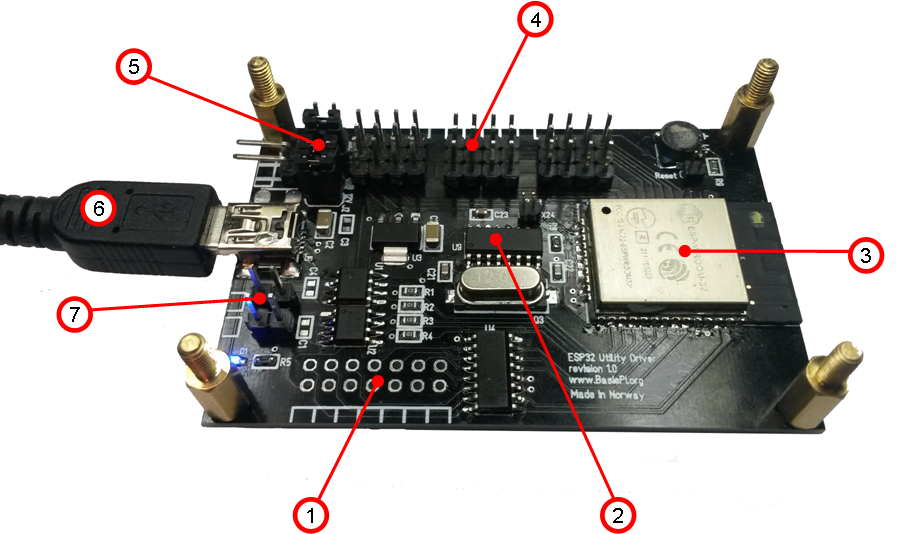
 I finally got new PCB’s for this utility driver and I still can’t get the programmer port to work automatically. All engineering is like that some times – try and fail – two steps forward, one step back. In this case it sadly involves waiting 6+ weeks for a new PCB once I find ut why it don’t work.
I finally got new PCB’s for this utility driver and I still can’t get the programmer port to work automatically. All engineering is like that some times – try and fail – two steps forward, one step back. In this case it sadly involves waiting 6+ weeks for a new PCB once I find ut why it don’t work.
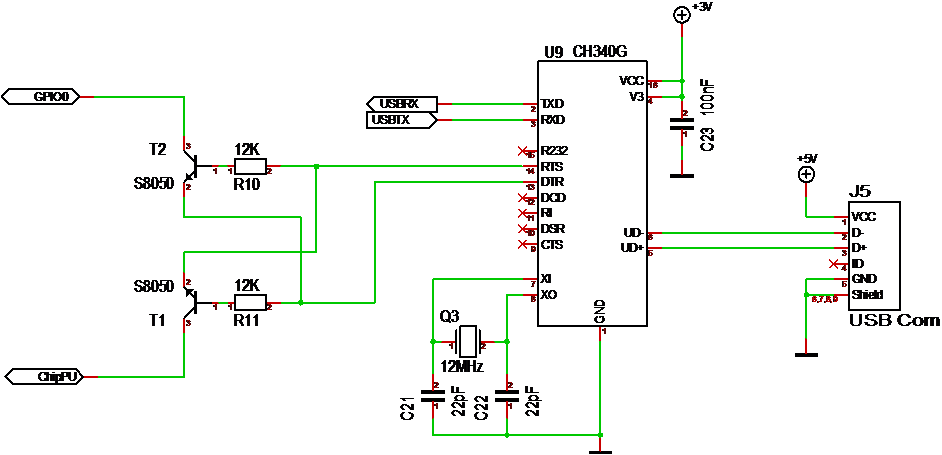
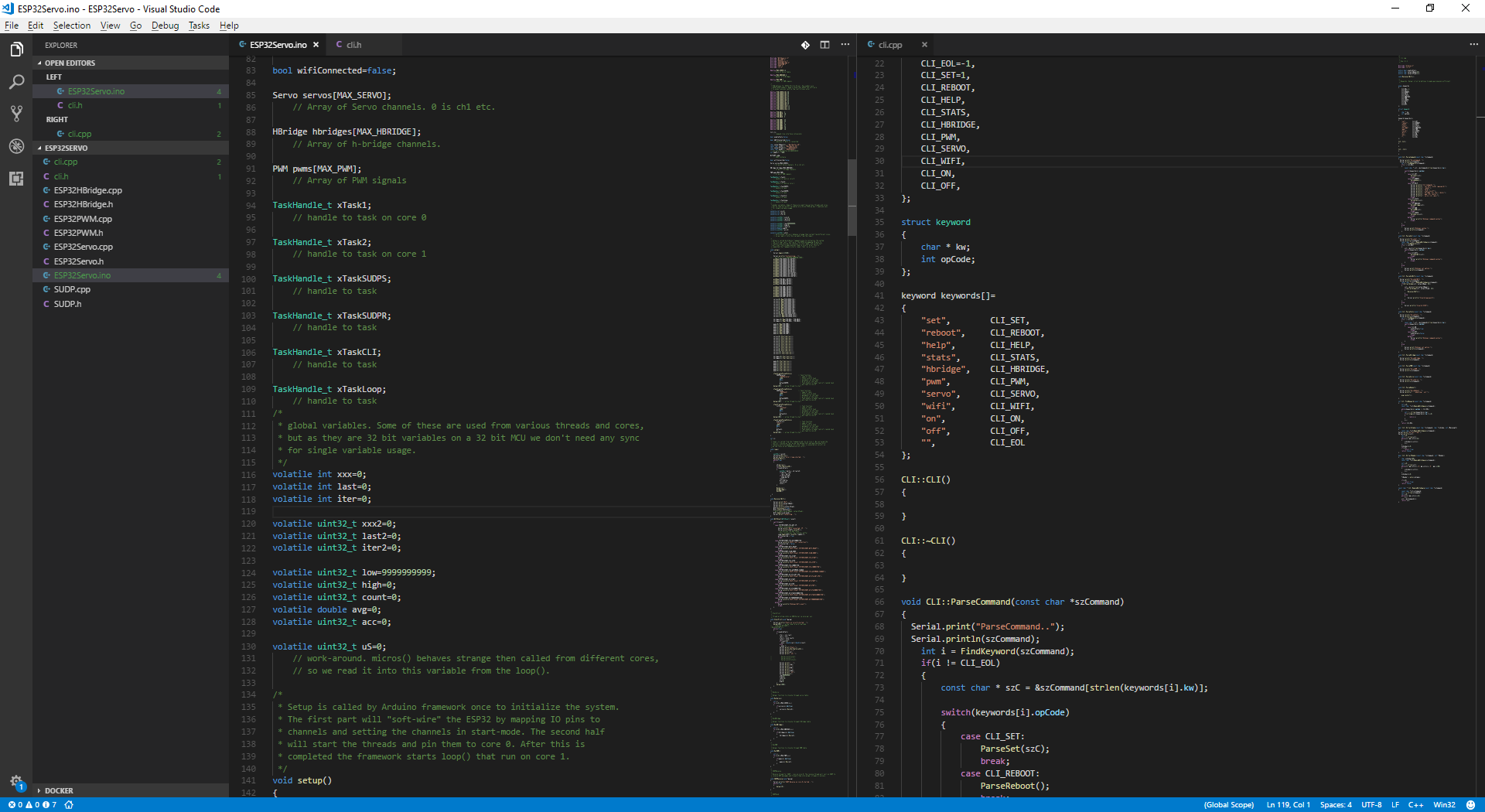
The logic with T1 & T2 should have driven the automation logic. I have double checked and this logic is used by many thought I also see a different solution used.
Well, next step is to use boot and see if I can program the ESP32 at all. After that I need to measure RTS & DTR to see if signals are as expected and basically see if I can tweak it to work.