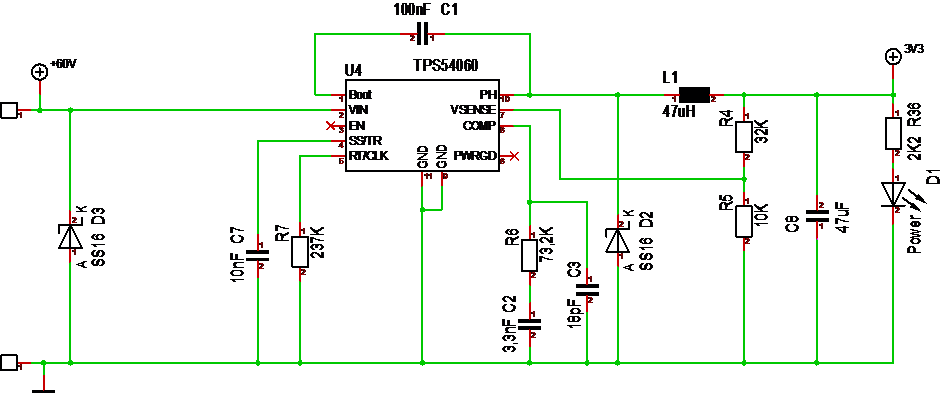
Investigating the issue one option is that what snapped the TSP54060’s is that my PCB tracks are to close for 60V. You need close to 3000V per cm to create an arch and that is 30V per 0.1mm. I can’t see a weak point, but those pins are 0.2mm apart. A bit of extra solder tin on them is all that is needed and 35V is suddenly dangerous. Again I can’t really see anything, but I realized that a MSOP might be to small to actually support 60V safely.
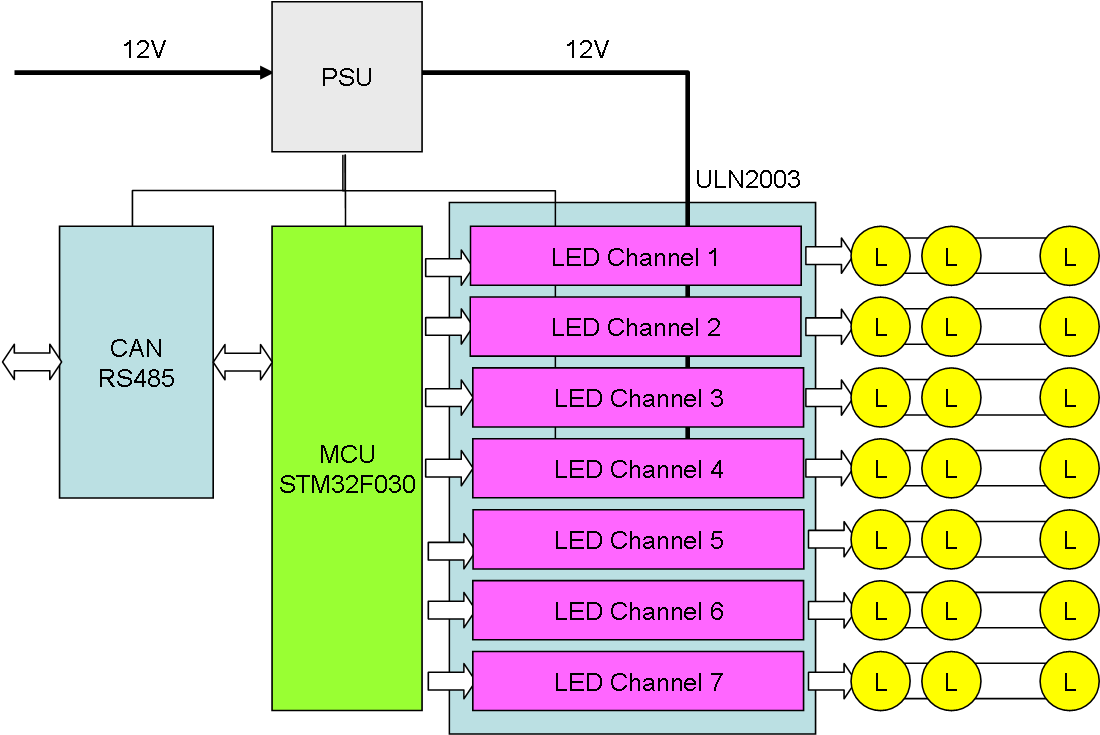
I will try a different circuit, but I will also knock up a few test circuits with different DC/DC designs to see if I can find a stable 60V design. In the meanwhile I will test on 24 and 12 V because I also want to test he actual motor driver. I also realize that as DRV8313 also have 0.2 mm between pins and I actually limited that to 0.15mm as I widened the tracks – I might have a second 60V issue here. Now 60V was never a main objective on this small controller and I am not sure this is the problem, but standards indicate that I need more distance.