I have a load of motor controllers that I want to continue on, but to focus on the more advanced ones.
MC4X60V50A
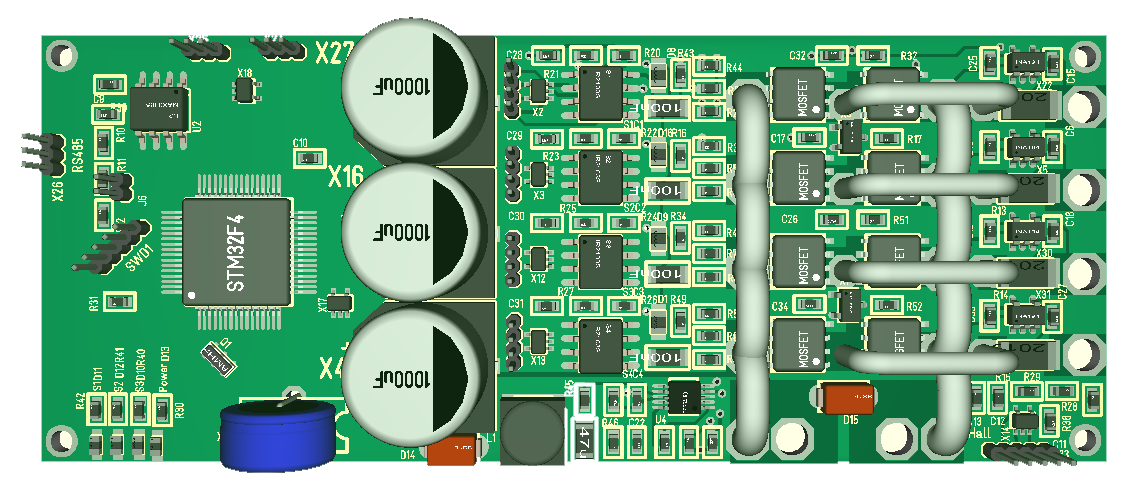
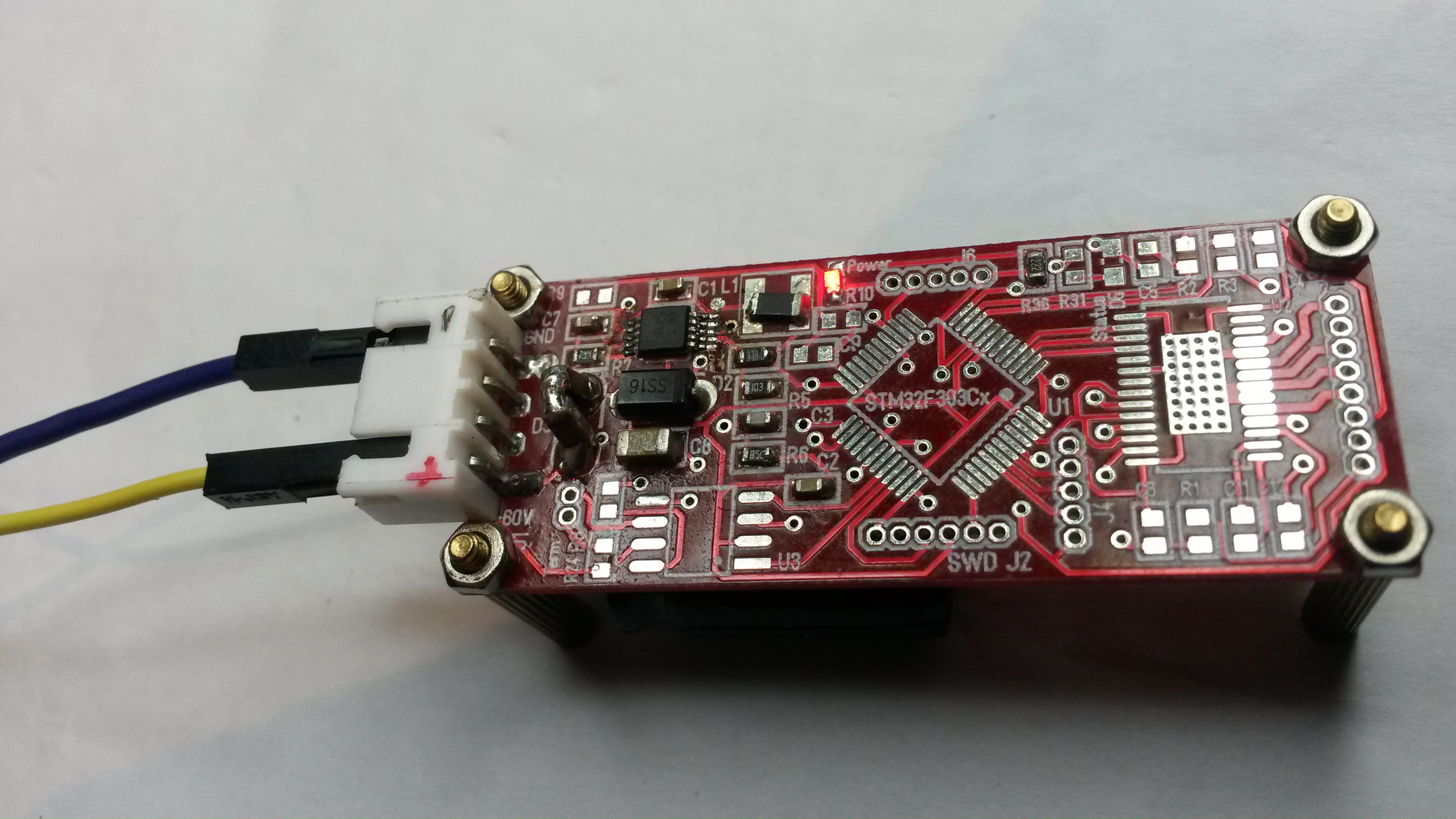
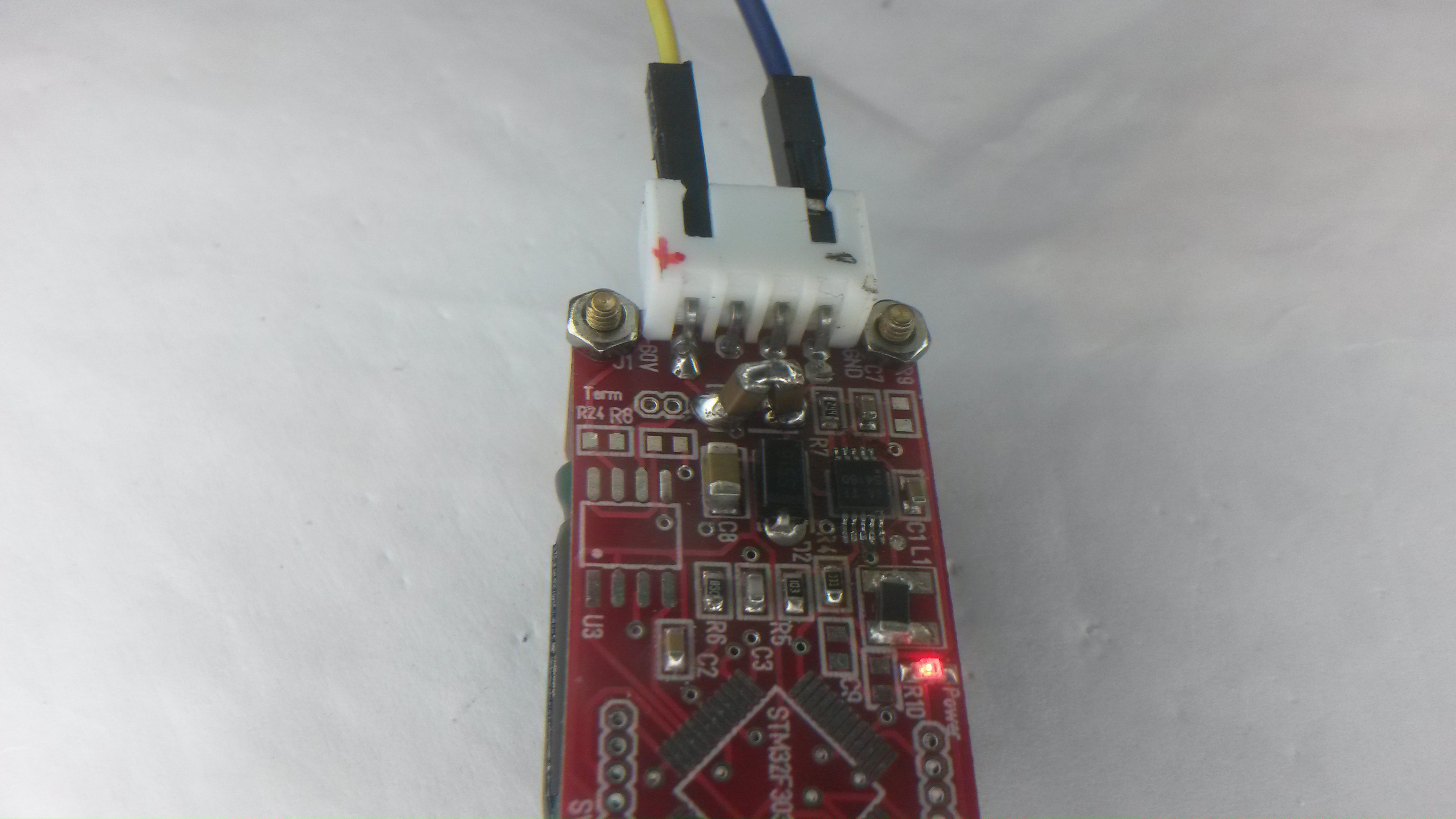
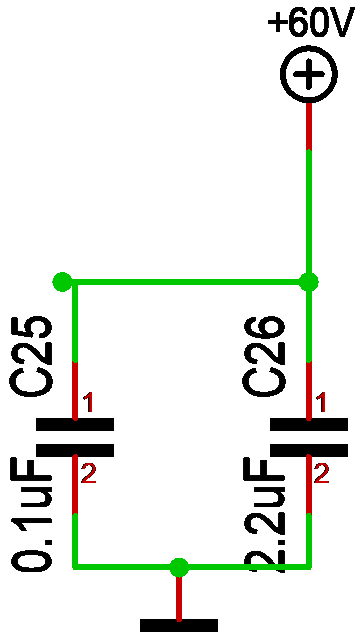
This is an early draft of rev 1.1 of the MC4X controller. Notice the heavy wiring at right to support 50A + all components top-side so I can add heat-sink on the PCB. All transistors have pad’s and being cooled at bottom. Two temp sensors added between MOSFET’s.. INA194 as Current Sensors, CAP’s on the PCB etc.
The results from the previous 1.0 version was actually so promissing that I am looking forward to this one. But, it is still work in progress.
MC3P60V50A
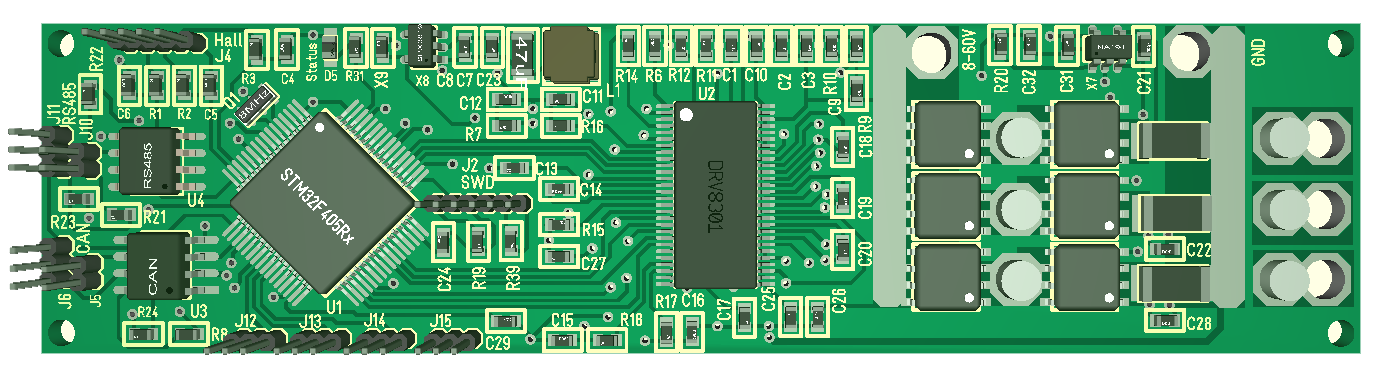
This has been in the pipe a few weeks. It is a dedicated 3-phase controller. It is 15mm more narrow than MC4X60V50 and uses DRV8301. I want to do an upgrade before I ship for this – some of the small capacitors are 0603 and need to support 60V – that will not work + I need a better place to mount the main capacitor.
Comparing MC3P and MC4X I must admit that I get a lot of functionality for those 15mm extra. MC3P is a bit smaller, but MC4X can do the same and more. I still want to do MC3P because I want to play with DRV8301. ANother change is that I consider putting wires on top so I can use a 100x25mm heat-sink on PCB-bottom.
Another concern is that I on this planned thick PCB lanes on power – simply creating a thick solder path. I am considering upgrading that to wires like I did on MC4X.
MC3X60V3A
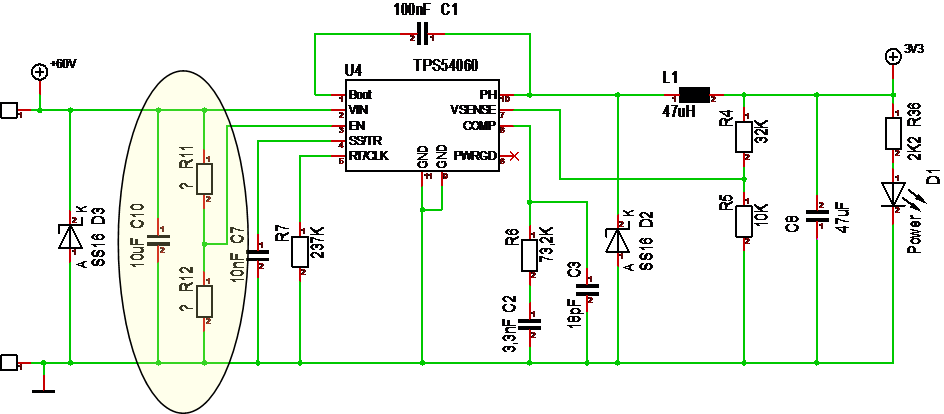
This is the smaller of the 60V design. First test failed at 35V, but I have been advised to make a change on the DC/DC that I want to try out.
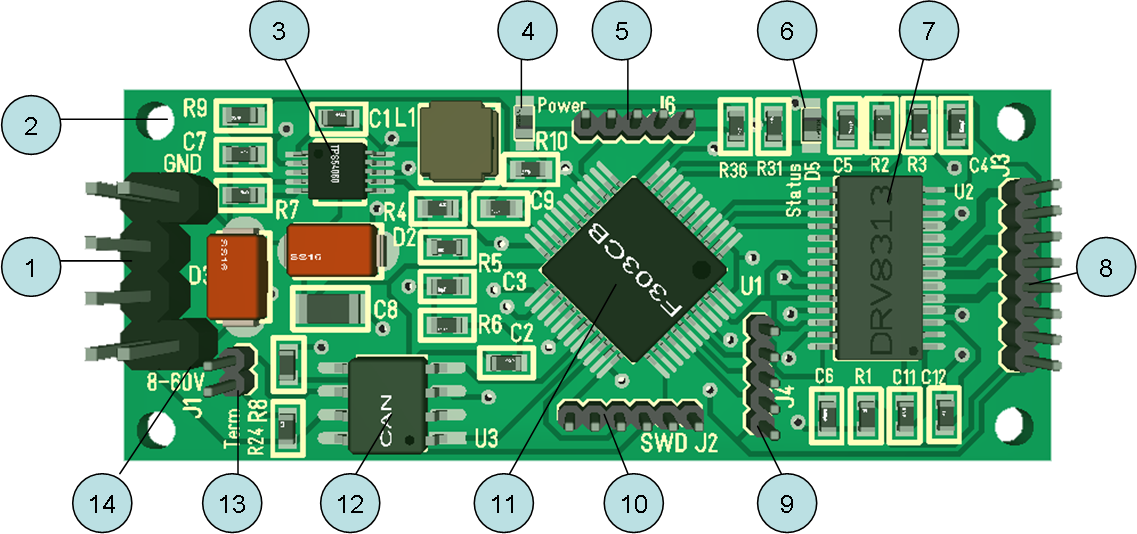
MC3P28V3A
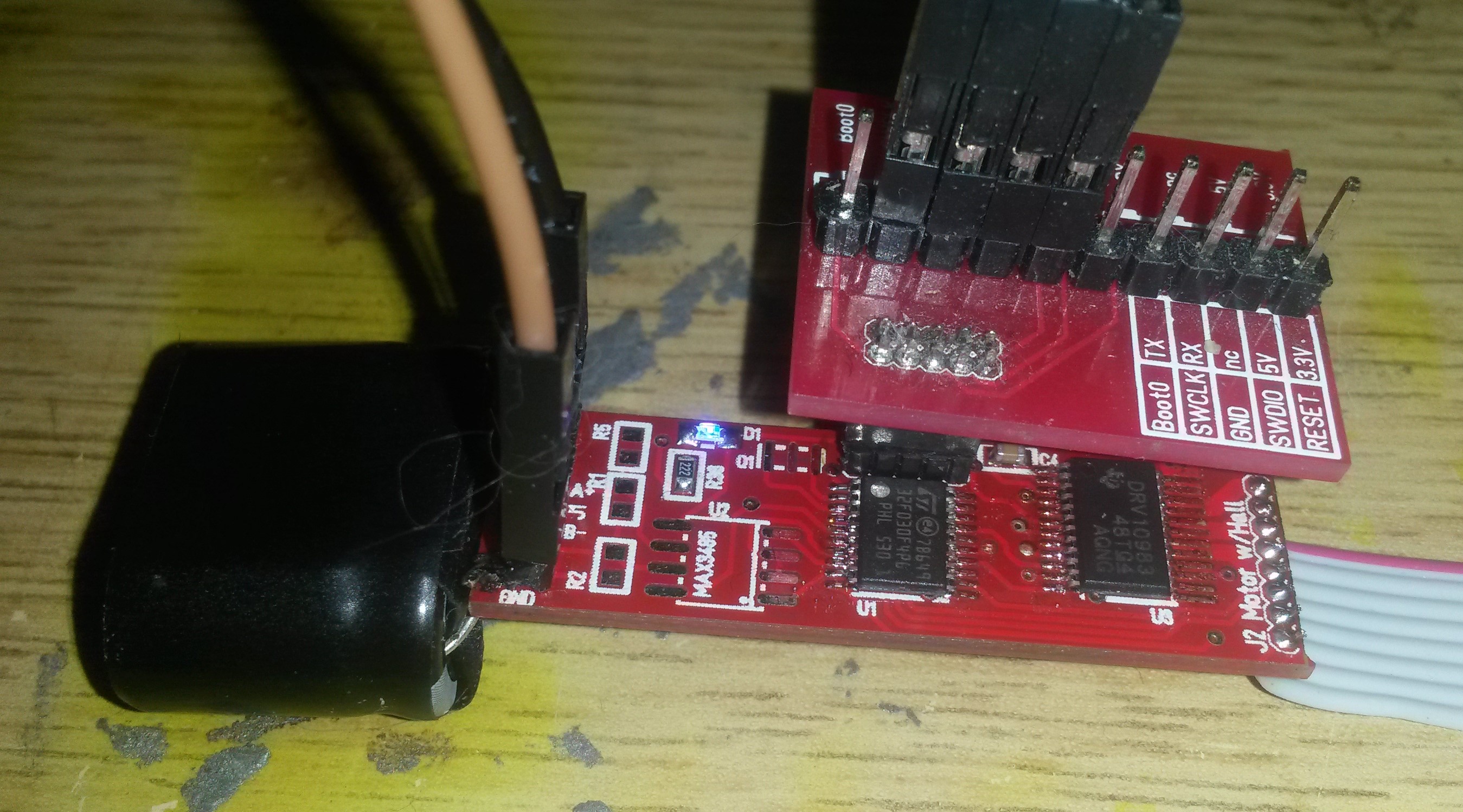
This is the smallest based in DRV10983. It works, but I am not impressed over DRV10983 speed regulation. I will find more time to play with the I2C interface on this, but I need to see a better controller if I am to continue with it.