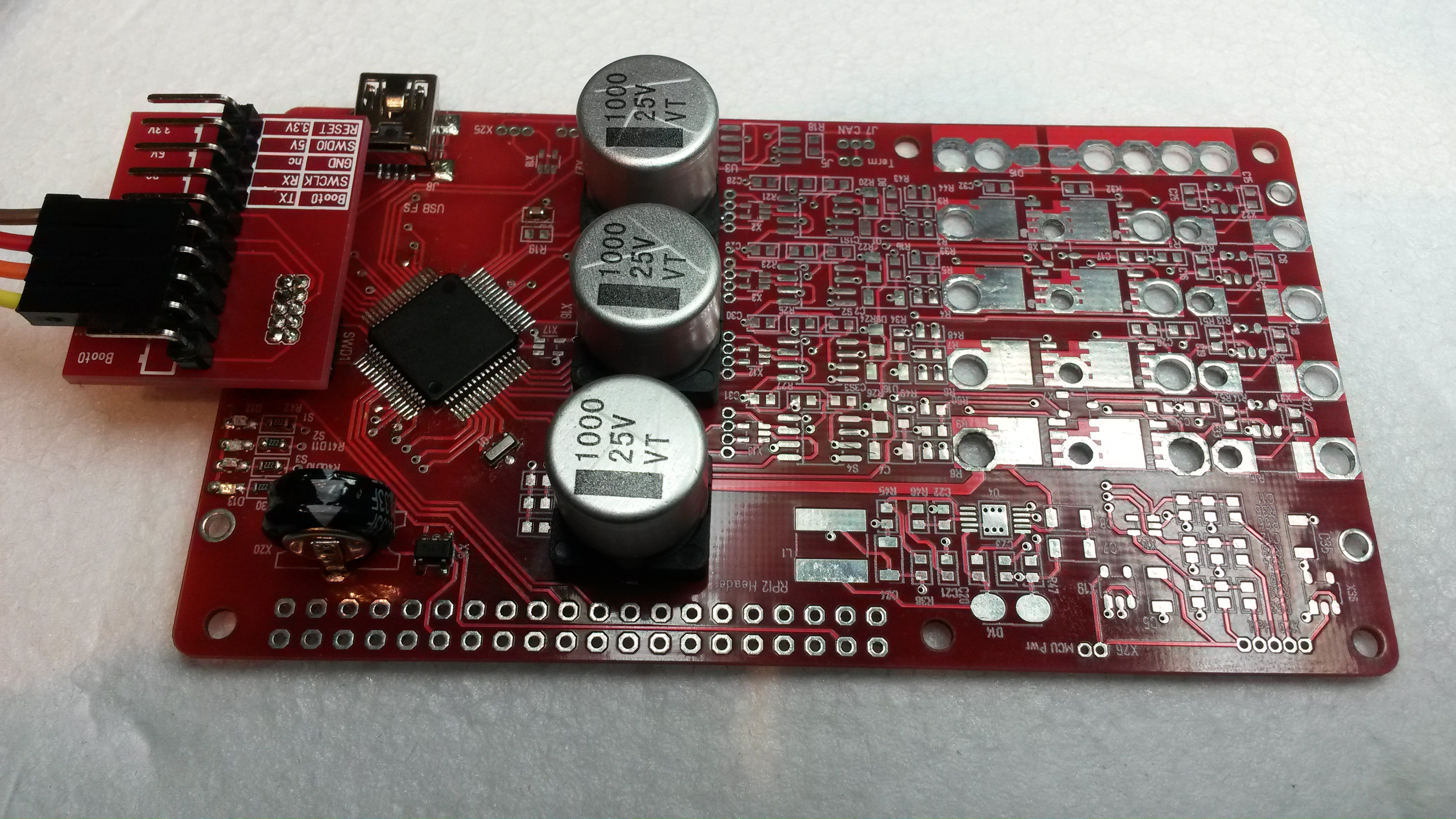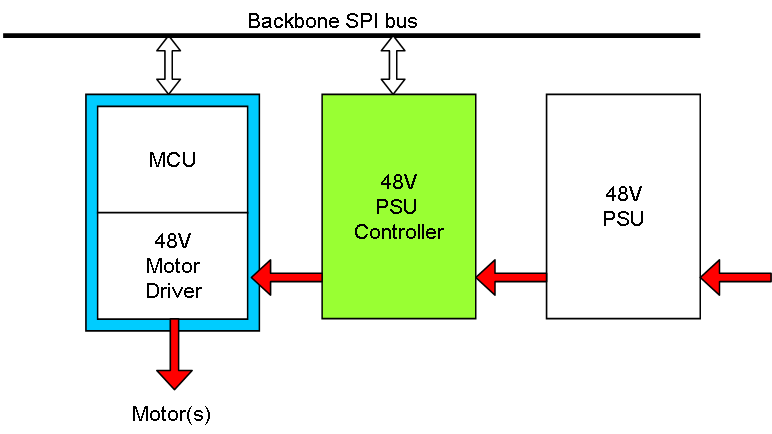
The 50A Motor Controller have 2 separate PSU feeds – one for the MCU and one for the Motor driver. This allows me to power the MCU and let this switch on/off power for the driver part.
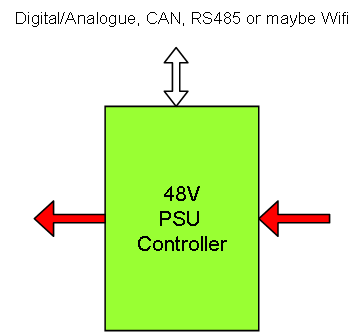
Simply create a 48V/50A PSU Controller Hat as illustrated on the drawing above. I like this idea, but I don’t like the idea of letting 50A pass anything on it’s path. I would need a large relay for this – or do I?
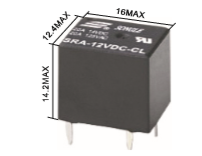
I have a bunch of these 20A relays that actually are very small. I am toying with the idea of creating a Hat with 3 to 5 of these. Basically I just combine PSU sources to get higher currents.
I am a bit puzzled by the marking of these as they rate 125VAC, but only 24VDC. I actually need 48VDC, but these only cost a few cents so I can test. I have larger ones that can take 230VAC and these relay boards are very handy regardless.
But, But, But… having to wire 50A through another board is not nice – so I am thinking several PCB’s here – I obviously would like relay boards in Hat formats, but I would also like a Hat capable of switching external power paths – meaning I put the relay on a separate board for higher current solutions.
 Actually it already exist low cost relay boards driven by ESP32 which is excellent for doing this job. I like to have my systems wired and only use Wifi if I must, but the good thing about the Wifi option here is that I can buy someone else’s board for a change.excellent for doing this job
Actually it already exist low cost relay boards driven by ESP32 which is excellent for doing this job. I like to have my systems wired and only use Wifi if I must, but the good thing about the Wifi option here is that I can buy someone else’s board for a change.excellent for doing this job
This is only a brief idea at present, but having relay boards and options as part of a modular control system is a must.