Plain (Programming Language for AI Networks) is very different from Languages like Python, Java and C#. The only similarity is that they all are based on a Virtual Machine and all use C/C++ as native host language.
One difference is that C++ is more openly integrated into Plain than Java and C#, while Python have an easy path to use C libraries as well. Plain is designed to extend C/C++, while the other languages tries to replace C/C++.
The core difference is however that Plain is network centric and capable of handling logic for a system distributed over a network. It implement concepts not covered by any other Language while it still build on the best from many Languages. In languages like C/C++, Python, Java and C# you need to develop the single device and manually implement a communication technique to other devices. Plain has all this build into core and the added “system diagram” concept that allows a developer to interact with a Complete system consisting of a network of nodes as if it was one system.
Plain support state engines at it’s core which provides a more natural way of coding AI Networks – it simply means we process based on events in the system and Focus more on WHAT we do rather than drowning in the details of HOW we do it. Plain can deal With HOW, but more important is that it leaves those details to C/C++ that is far more suitable to interract With Electronics. Close interaction With C/C++ is important and is provided through it’s OS.
Other key features are parallelism, threading, distributed processing and complex concepts implemented at core with mechanisms forcing the developer to use them in a systematic and safe way.
Plain is basically an assembler assembling into a RTL (Real-Time Linker) syntax that the VM need to convert to executable.
BasicPI OS is implemented in C++ and provide easyIPC, a networking technology that is at core in Plain, but other more classing communication protocols like Modbus and CANbus can also be supported.
At the end of the day Plain was developed for one purpose – I wanted to do more with less hours. I wanted to build high quality AI networks capable of handling complex logic with only a minimal number of coding lines.
Plain looks like an advanced 3rd generation, text based language, but it is referred to as an assembler because it is 1:1 between Plain statement and VM instructions. The higher end of Plain is another language not described in details yet called PLD (Plain Logic Diagrams).
Plain has a lot of heritage from various older languages and easy to learn and easy to use has been at core in it’s design.
Status of Plain is that it’s core infrastructure is coming together, so I will start on it’s Assembler, Linker and VM – they exist as proof of concept, but it’s a job to complete them.
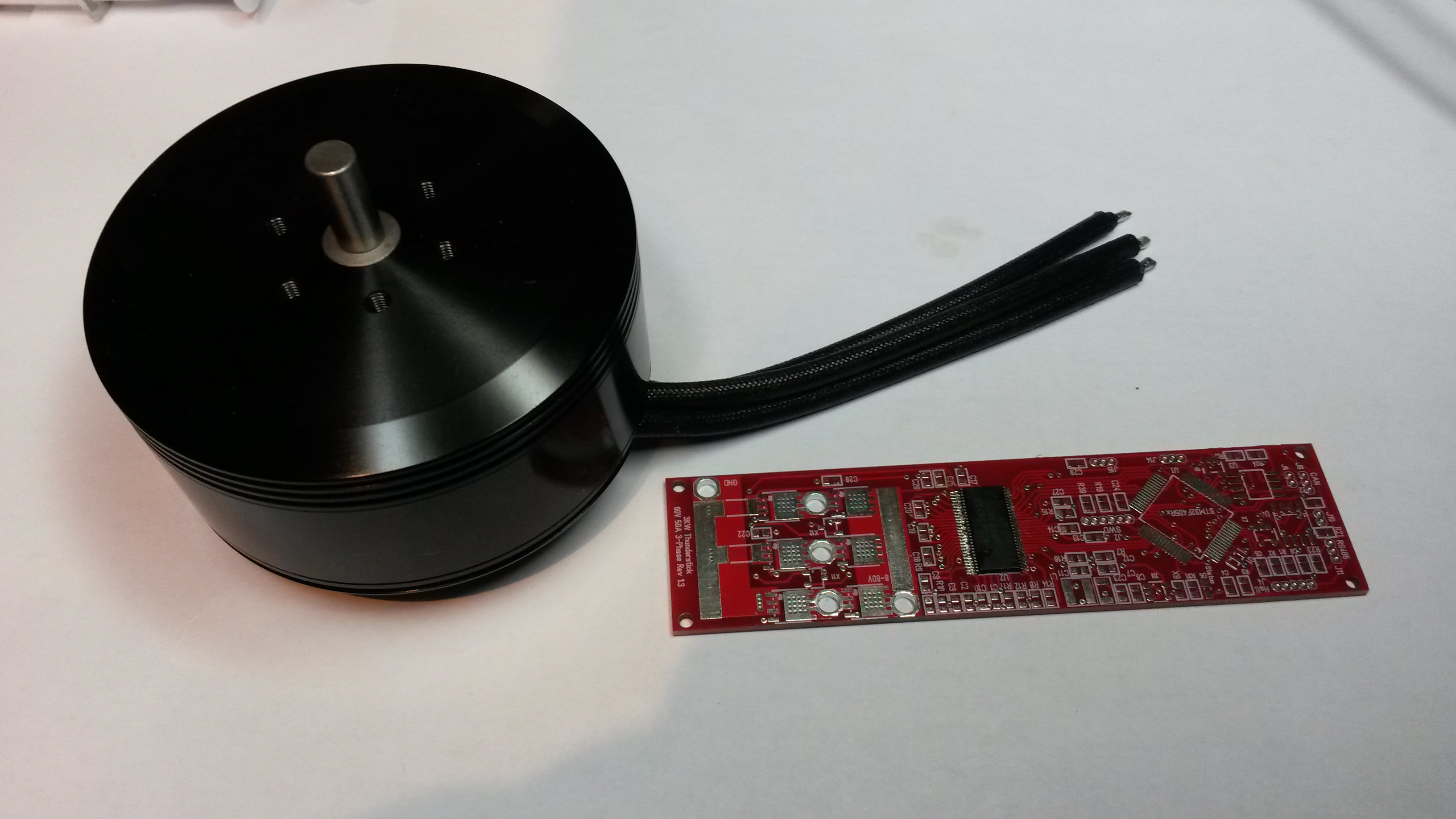
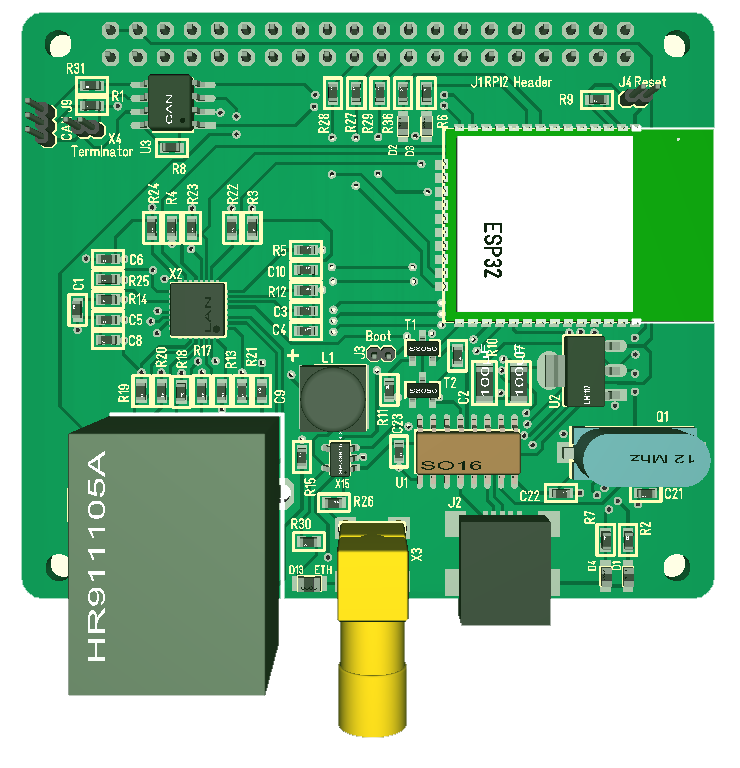
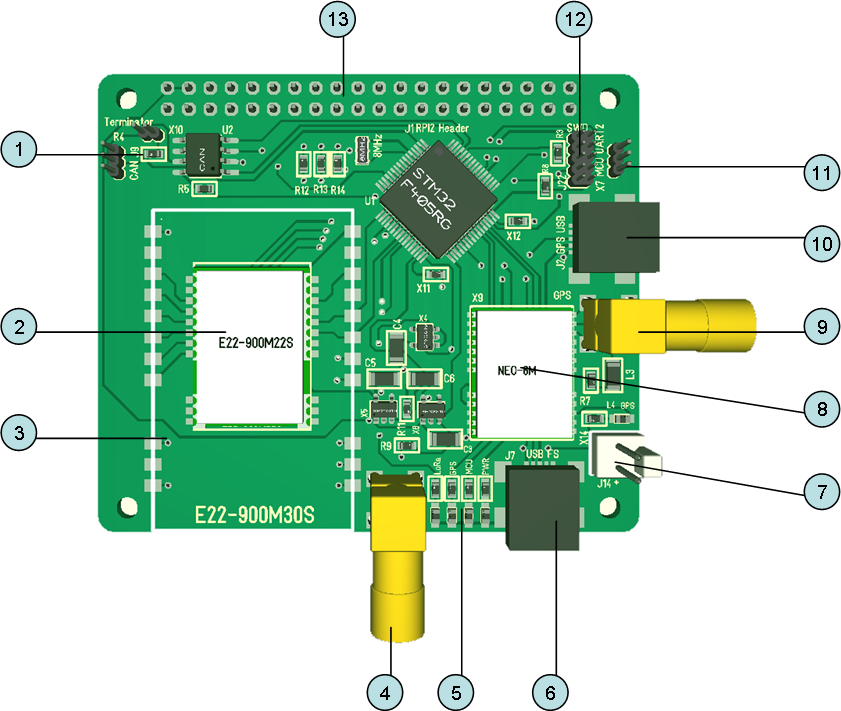
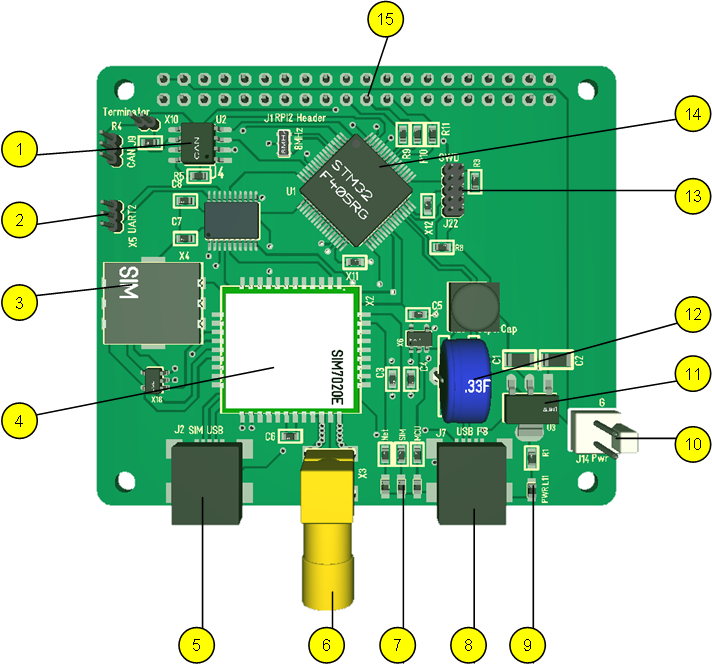
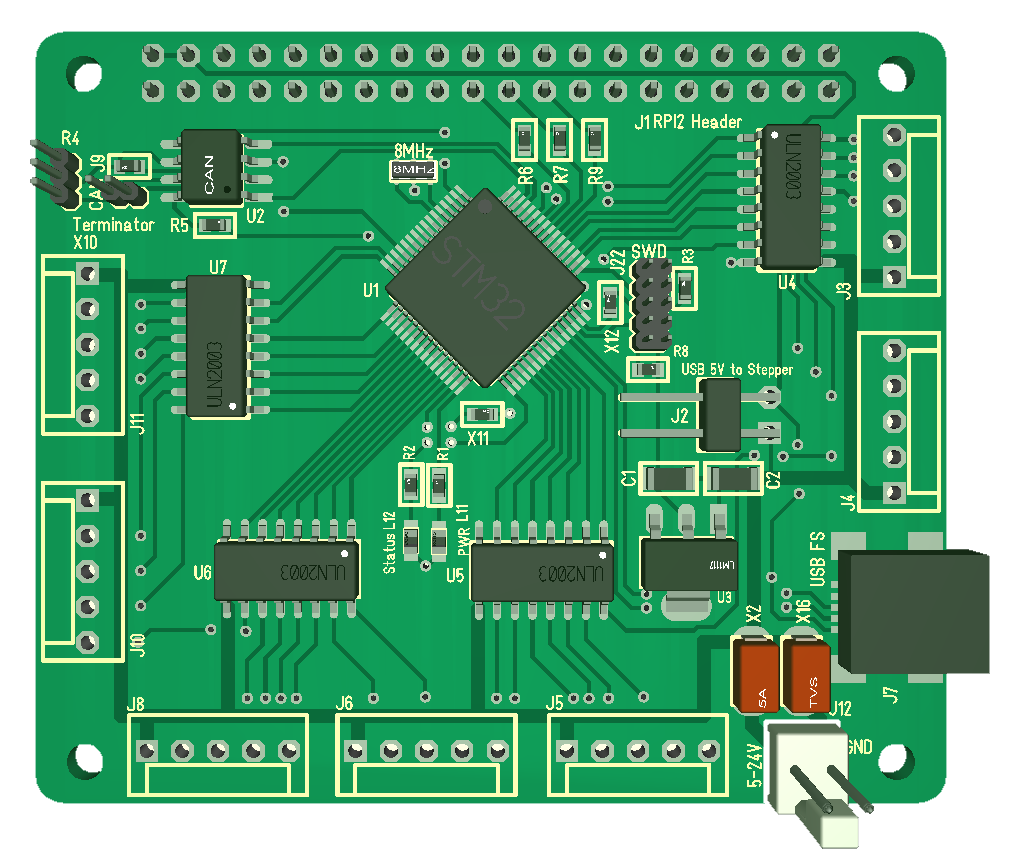
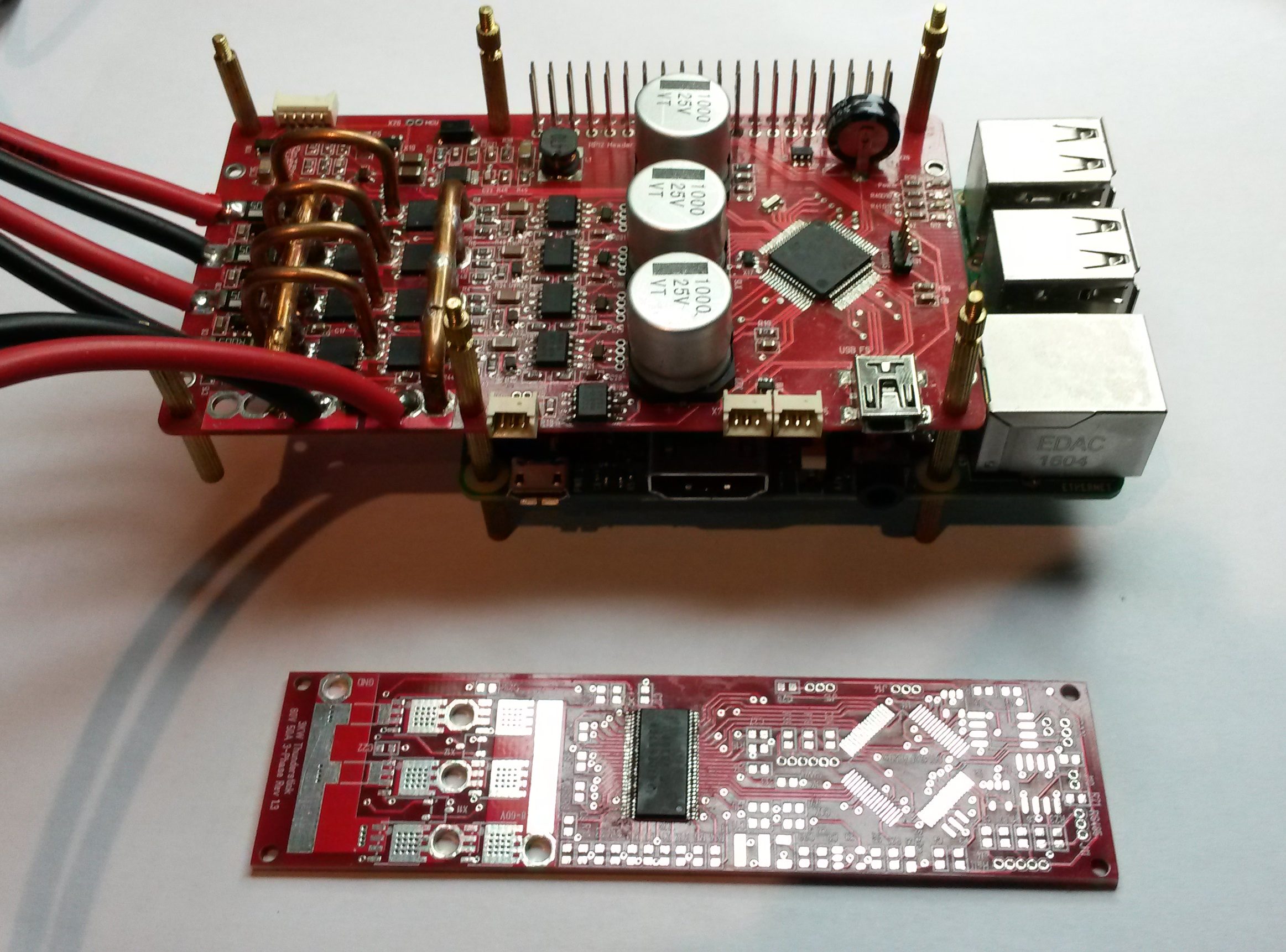
If you have followed the long path on this blog you will see that I am building electronic components that form part of a modular control system. Each of these will be loaded with a Plain VM + supporting C++ infrastructure to handle the device. Once they plug together the magic will happen as they interconnect and automatically form a system controlled by Plain. Seen from Plain it will look as if it all is on one small super-computer.
Plain is not a magical wand making robots more intelligent. In many way it is a modern PLC making it very easy to control the machinery of a complex, modern AI. The actual intelligence is in the logic applied by the developer. The only difference is that Plain will allow even none-developers to do far more will less effort.
Programming languages have not really changed that much since Grace Hopper implement the first ones, but Plain is a huge step forward into allowing the developer and user to specify what a system should do rather than drowning into the details of how things are done like we do now.
The only part missing from Plain is that I have not described how we do advanced Web applications that will be coming up later.
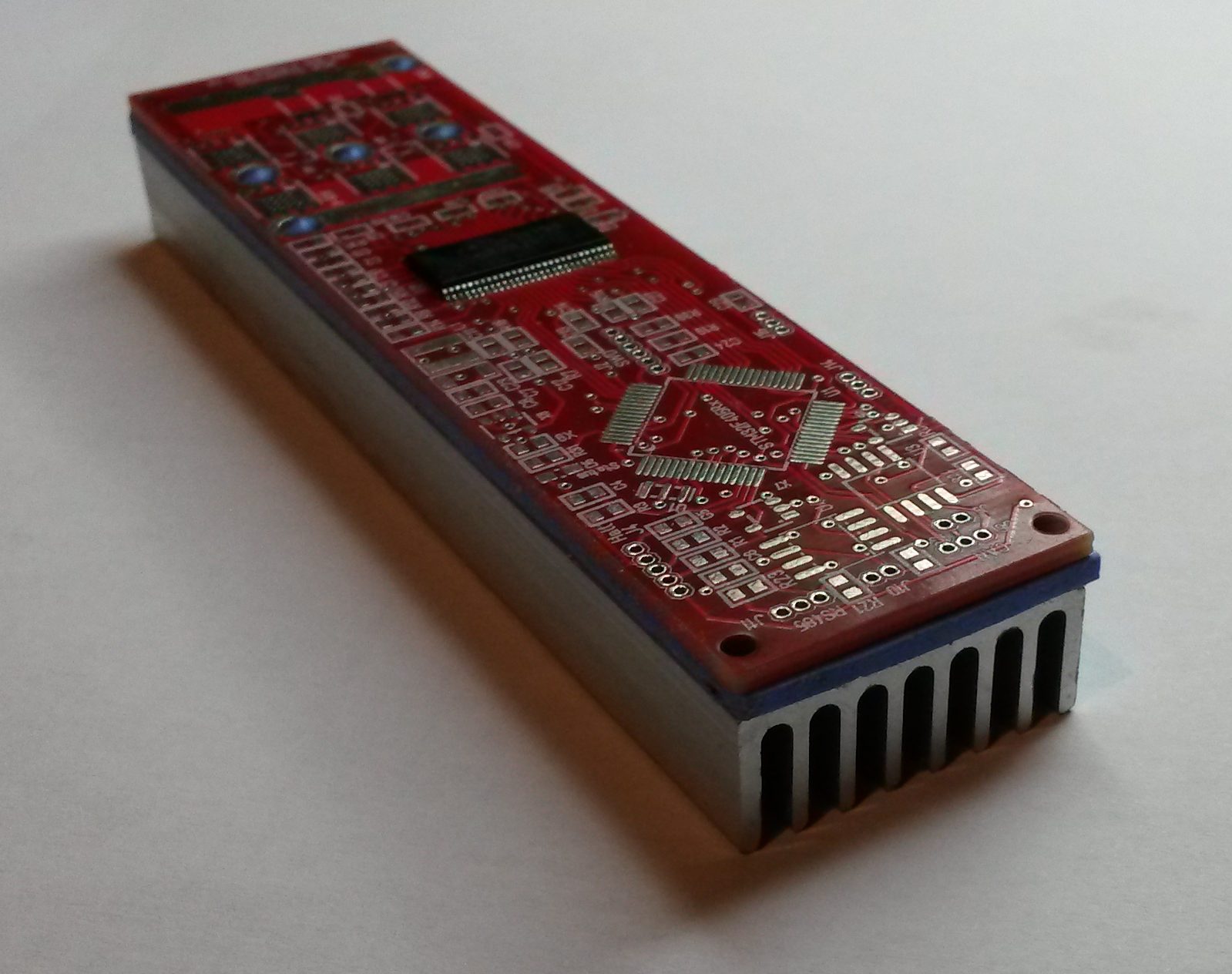
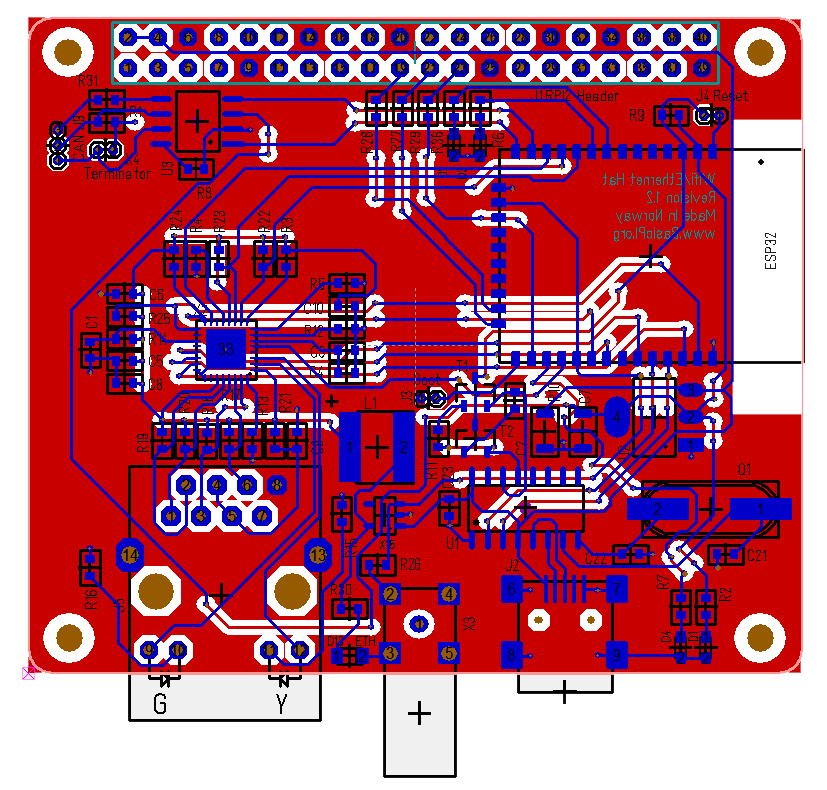
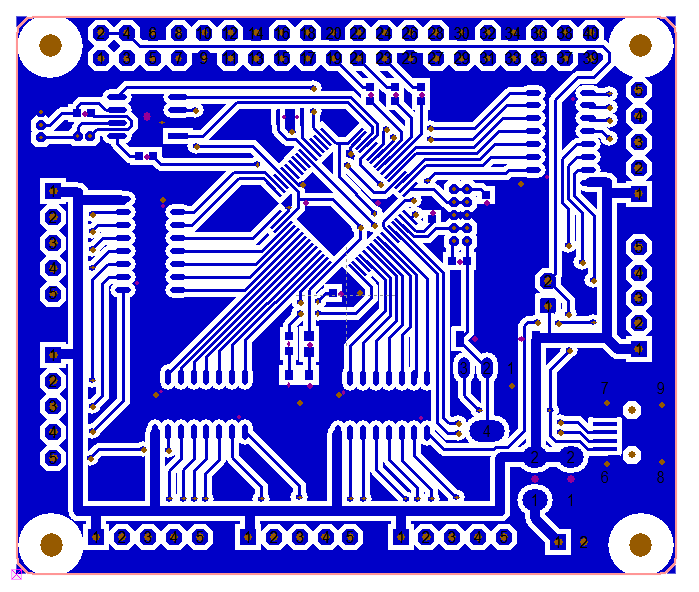
 This shows the backside of the board with pads for MOSFET and DRV8301.
This shows the backside of the board with pads for MOSFET and DRV8301.