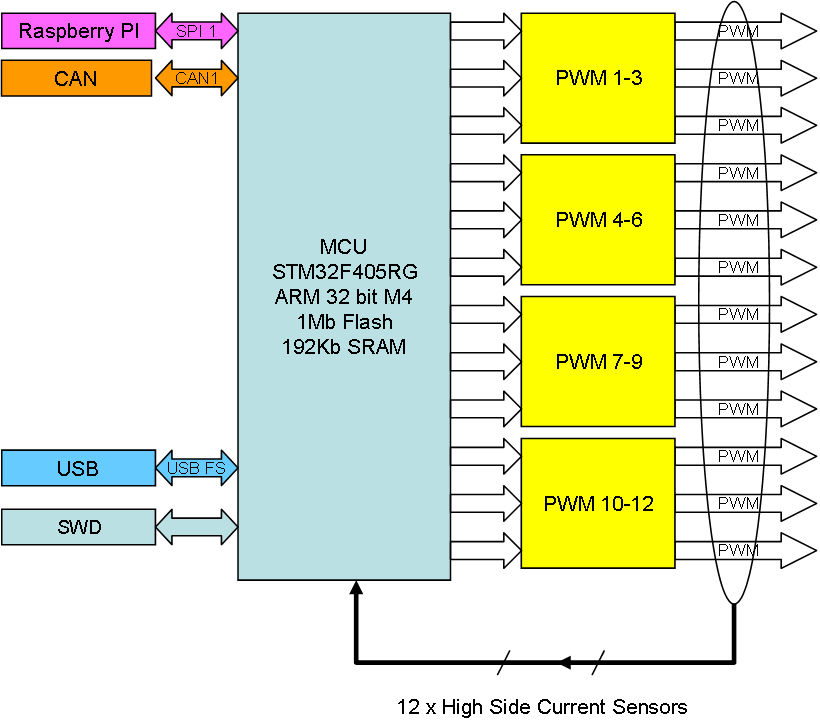
We are getting closer to x-mas and I am about to start setting up led strings in my garden. I have a load of 12V and 24V led strings, so I plan using my PWM12 Hat as LED Driver as illustrated below.
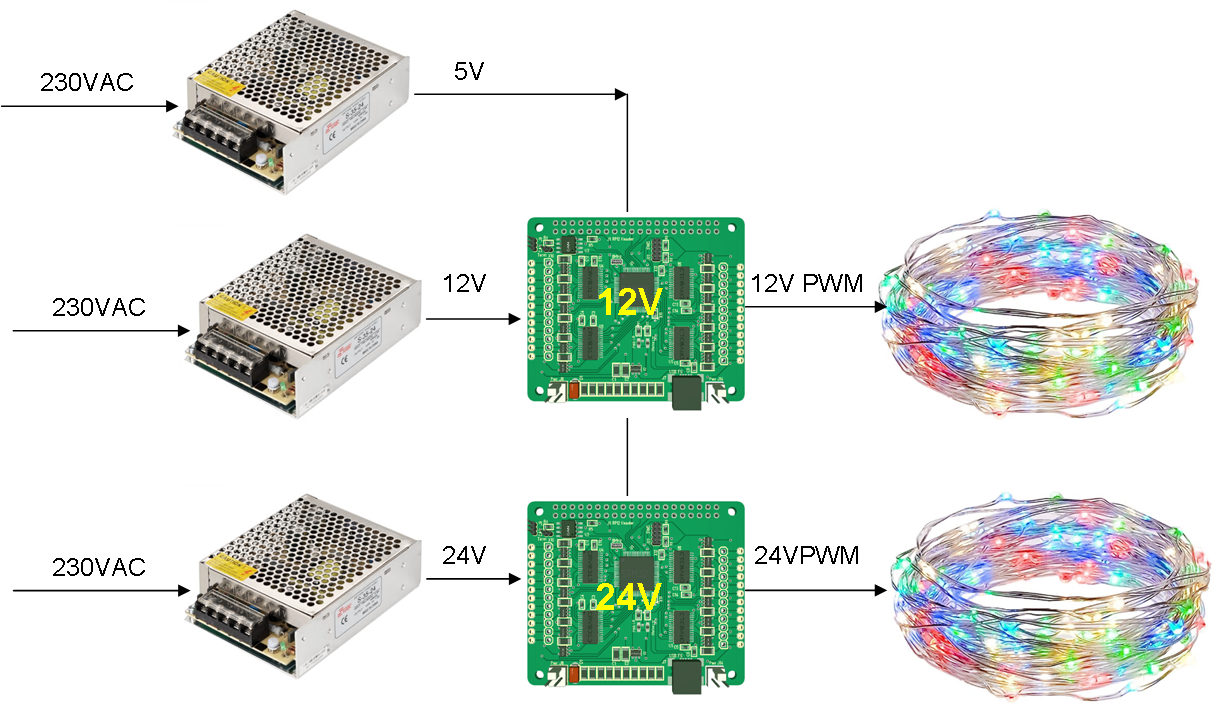
The system set up is straight forward – I use a number of PWM12 Hat’s stand-alone to drive the strings. Each channel can drive 5-10 meter of Led’s and I can support both 12V and 24V systems. I need to make a PSU with 5V, 12V and 24V and some kind of waterproof casing for the driver – I will probably just use a plastic bag and mount it on a plate for now.
Programming is easy as I can remote control this through the CAN ports and all we need to do is to output a PWM signal. Most strings are single lights, but I also have a RGB string that need 3 signals to set color. We set intensity by regulating PWM duty, but I have to work out a conversion scale as this is not a linear conversion. Using 32 intensity settings I can get 32,768 different colors on the RGB setting.