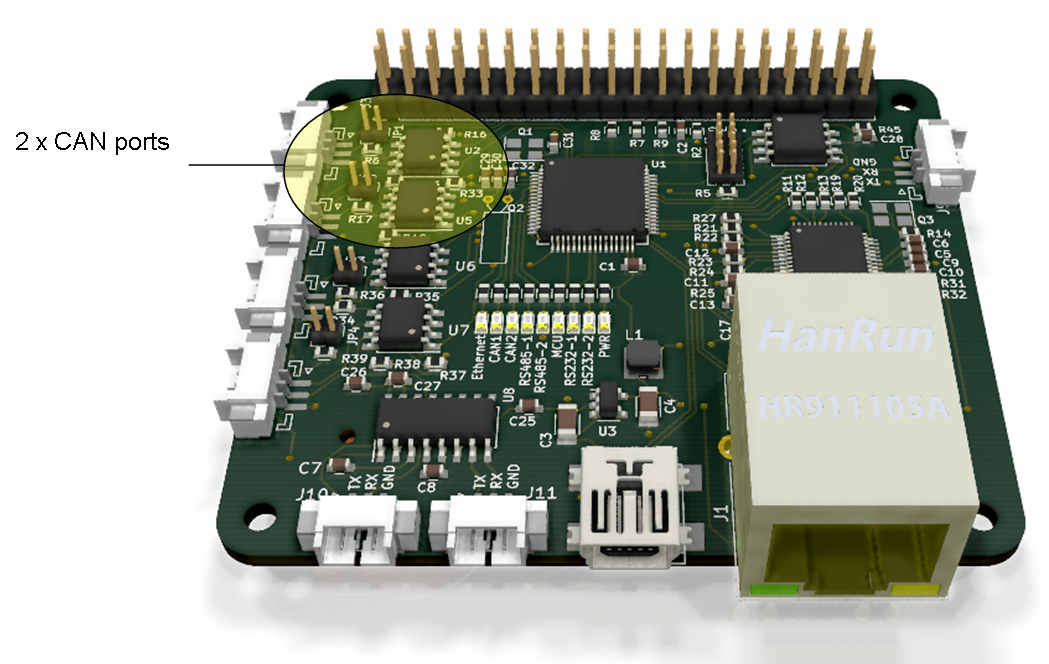
The plan is to use two separate CAN Networks on my Lawn Mover – one network for motors, and one network for everything else – both using CAN HS at 1Mbps. To do this I consider upgrading XportHub. This picture show XPortHub2 w/2 CAN Ports. ISO1042 is an isolated CAN tranceiver in a SOIC8 a bit wider than the SOP8 used above and it should be realistic to upgrade XPortHub1 or XPortHub2. As I have no experience with ISO1042 I will have to experiment a bit.
My previous experiment with “all in one” galvanic isolated tranceivers is with ADM3053 from Analogue Devices – the buck converter on this used 180Mhz and needed an extra coil to issolate frequencies on + voltage. But, it also created a bit of heat and occupied space. The buck converter on ISO1042Q1 (Aytomotive version) runs on lower frequency, so I hope to see less heat and avoid that coil. But, I will still need more space than the SOP8 packages above.
Yet another option is to ditch the serial ports and Ethernet and add a LoRa connection – that will be a new board, but it will be a dedicated automotive controller and save me from adding a separate LoRa Hat LoRa has a much longer range than WiFI which will be attractive as I might have challenges with Wifi coverage everythere.
A LoRa module cost around 8ich USD and each ISO1042 cost 4-5 USD + I would like the TF card back if I do a new board. This will not be a cheap board.
Just to remind everyone – doing this without galvanic isolation will work just fine until you have an issue with one of the motor controllers and find your entire system dead. I will be reusing this infrastructure on heavy drones, so it is worth getting critical bits isolated.