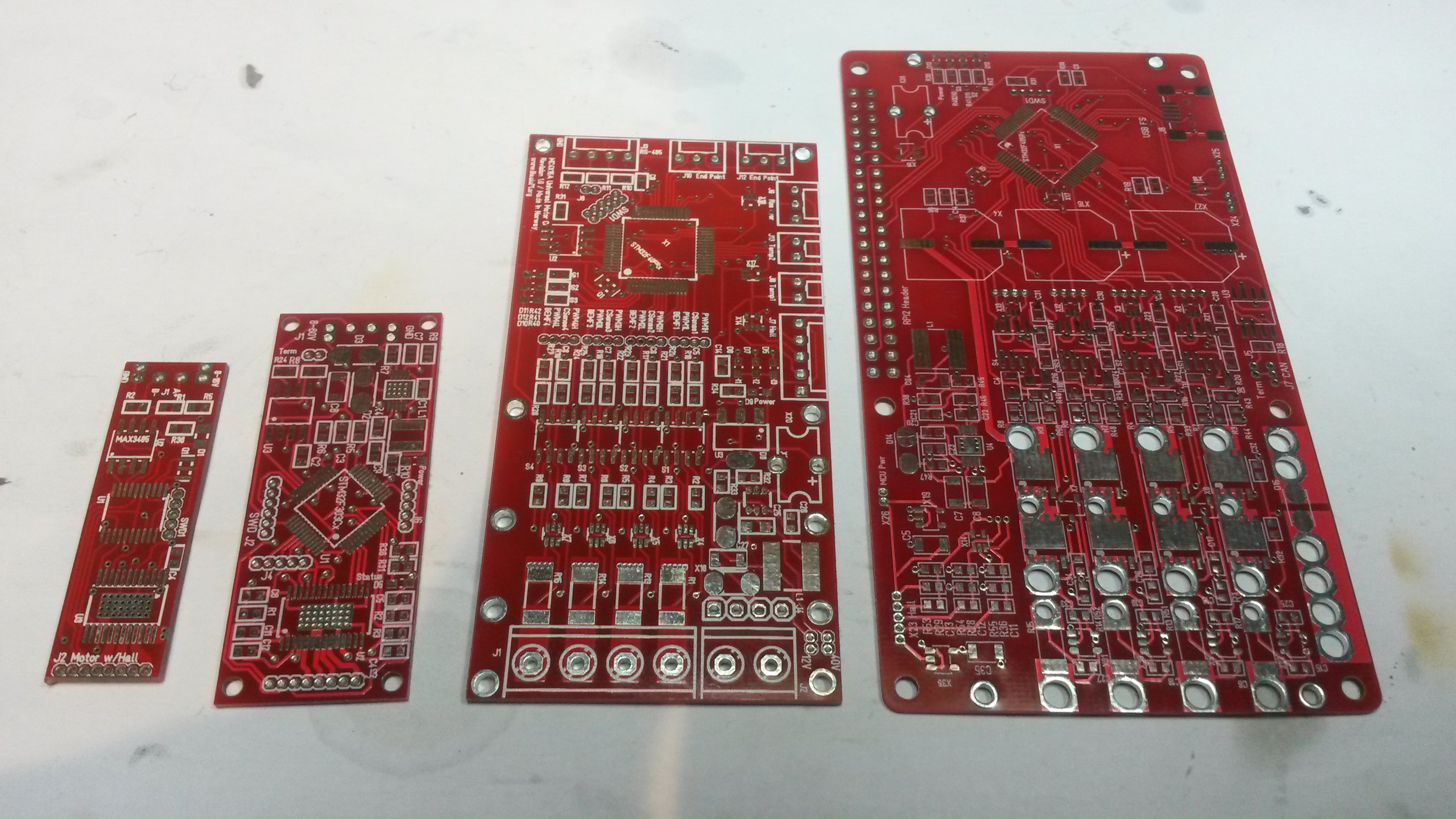
These are the 4 different motor drivers I have made so far.
The smallest (at left) is capable of 24V @2A. It uses DRV10983 and one of the smallest STM32’s. I got it working, but I had some trouble controlling the logic to behave.
The second one uses a DRV8313 that basically is 3 x Half-Bridges. This works perfectly, but I am not to happy with the Hall Sensors on it + I had some challenges with 30-60V supply. I was however very pleased with the performance of DRV8313 which is why I also use this for a Hat.
No 3 from left is a 24V @ 15A on 4 separate Half-Bridges. This is designed to drive a decent 3-Phase or Stepper. I tested the driver for 10A fine, but I had serious challenges with dodgy MOSFET’s from Asia on this. The only part that I have not been able to get working is INA210 current sensor, but I have 9 left. My initial thought was to abandon this design because the next one is so much more powerfully, but it is also a matter of size. I was all in all quite pleased with this design.
The last one at right is an upgrade to 60V and 50A + I use the Raspberry PI Hat format. The story of this one is yet to be told.
The designed max effects are 48W, 120W, 240W and 3KW