I am just assembling one of my first Raspberry PI Hat’s With a 3 x RS485 and 2 x CAN for testing. The circuits below is what I used at the time. Rev 1.2 will use 3.3V only and remove the components crossed in Red.
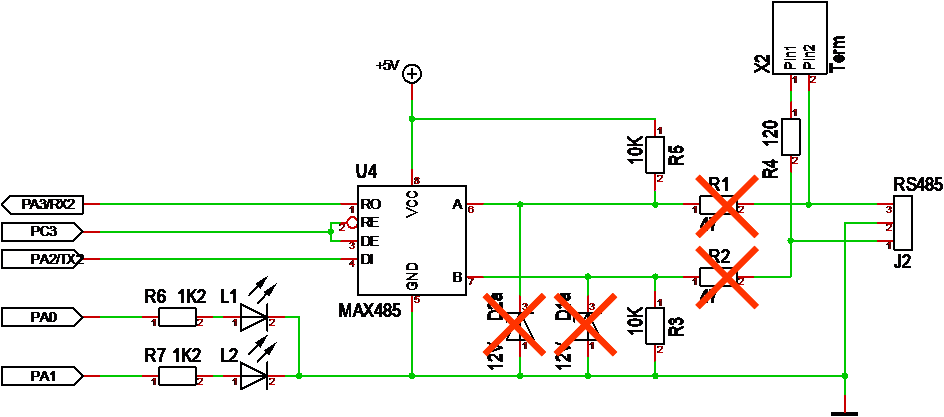
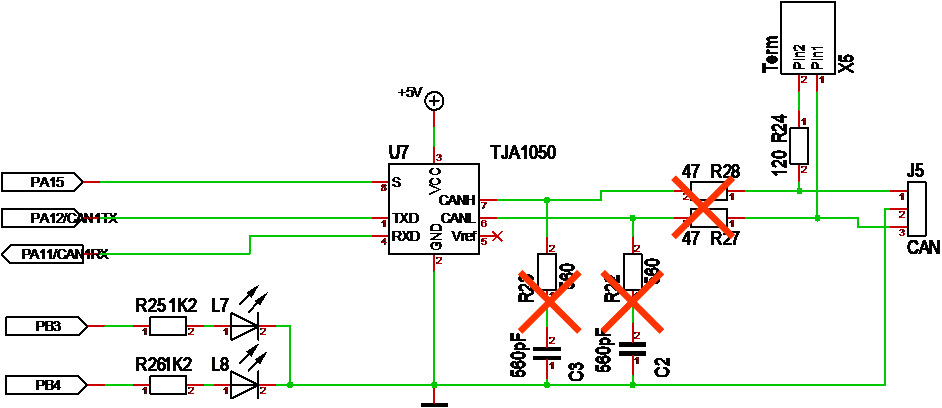
It is a common error to add protection towards ground, but what you actually do is to force ground to be part of the signal. RS485 and CAN are both differential signals that should not need ground. If you need protection use the galvanic Versions! Even worse, the “protection” will disturb your signal quality at higher speeds.
Another issue here is that RE and DE is connected – this works, but it prevents some options – etc reading as you send to detect conflicts and disabling both sending and receiving etc.
The rev 1.1 also used some 1206 Components and a mix of 3.3V and 5V, as well as a XC6206 3.3V regulator in SO23 package. This will all be replaced with AMS1117, 0603 packages and 3.3V Components. Rev 1.1 also had the mistake that I implemented ground plane on both sides – it is not realy a mistake as such, but it makes it harder to assemble prototypes by hand.