If I ever want to know where my wife’s cat’s are hiding I only need to start this 12 servo monster – I instantly have a horde of cat audience…
I will mount the control system on the inside of the box, but I still have to sort out the battery & PSU. Knowing that my Lab PSU was failing I want to redo some of the power tests. What happened with the Arduino stack was that Arduino kept re-booting as the Servo’s started. I now believe this might be caused by the Lab PSU and that I can get away with less peaks than I calculated.
Another solution is to get a 7V (2 cell) battery and use that directly avoiding the need of a PSU handling 10A in peaks. The Servo PSU are separate from MCU PSU as well, so we can avoid that the Servo’s drag down the MCU anyway.
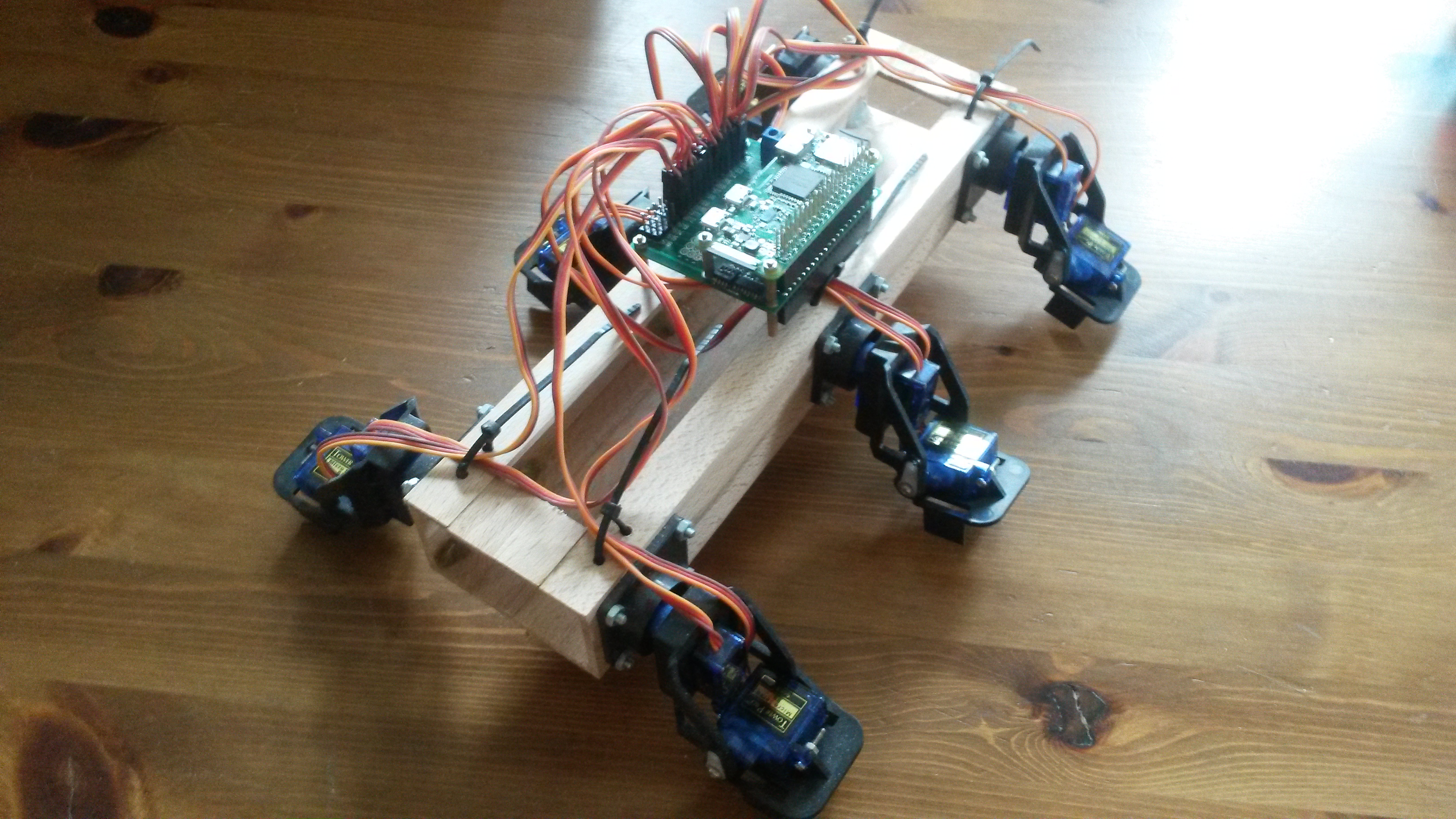
As mentioned earlier the legs here are actually 2.- USD pan&tilt camera holders misused for this purpose – I need to look for a different solution is these will break after some usage, but not before they have served their test purpose. For me this is about having a bit of fun while I am testing concepts related to Plain & distributed control systems :).
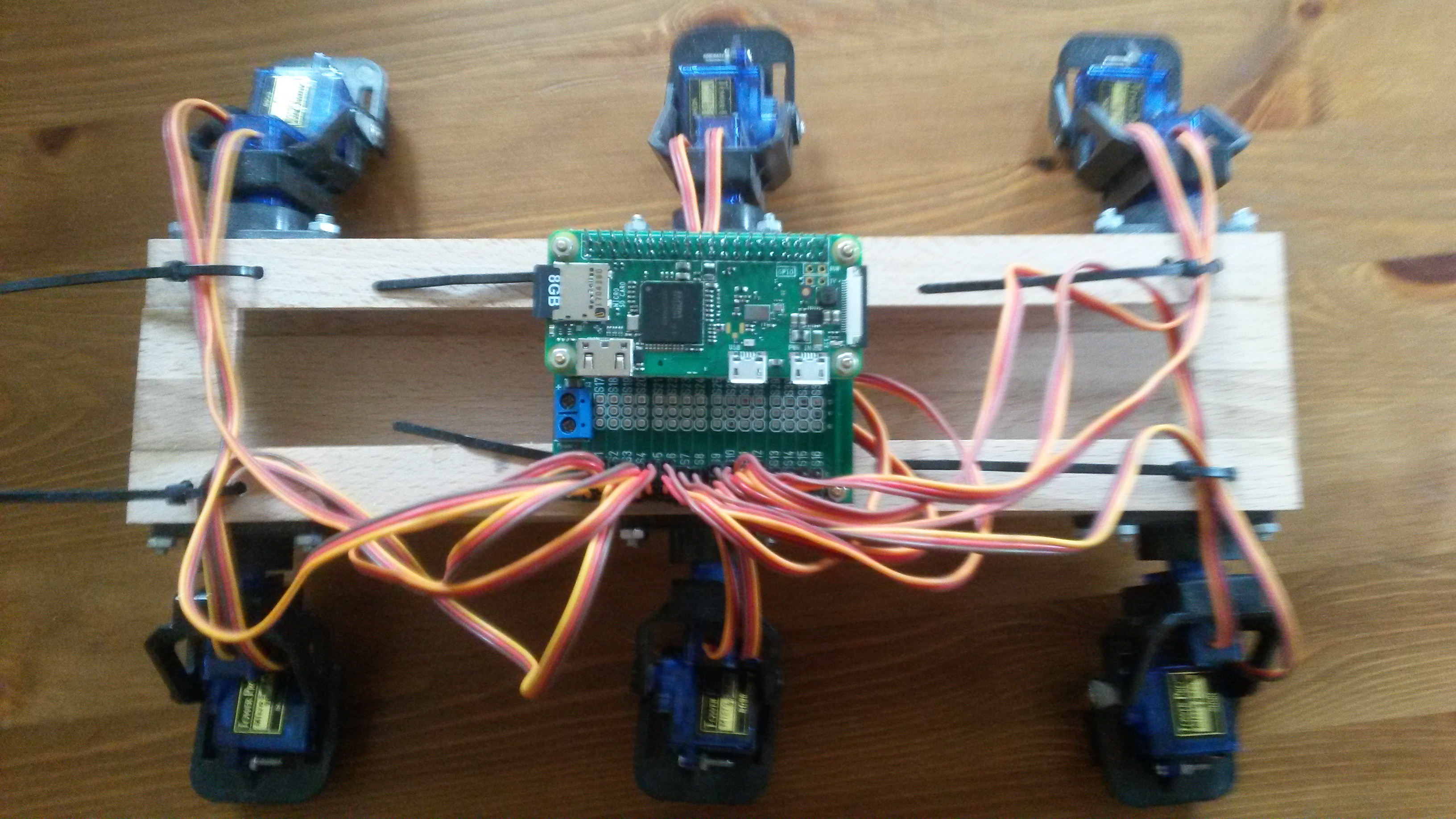
I initially planned on using Raspberry PI 3 or 2 here, but Zero W is perfect for this usage – a Minuture Linux computer with Wifi & Bluetooth all for 10.- USD. I don’t need the bigger Linux computer for operating the robot – my STM32 does that much better, but RPI add’s the Wifi with security + it adds the AI capability – I can actually program the robot to remember map’s and how to get from A to B etc – meaning it becomes more than just a ROV (Remote Operated Vehicle).
My wife’s cat’s are trying to break into my lab…