int main(void)
{
int x=0,y;
char buf[100];
AppInit();
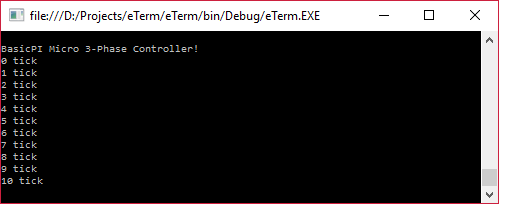
printf(“\nBasicPI Micro 3-Phase Controller!\n”);
while(true)
{
nanodelay(1000000);
printf(“%d tick\n”,x);
x++;
}
}
The 3-Phase micro controller use a RS485 (RS-X) connector. I have not enabled the RS-X package yet, but I always start with a simple printf implementation and a terminal program. This is in 99% of the cases the only debug I need. It will be implemented on top of RS-X as well. Just nice to see that the MCU actually is ticking before we start digging into running the motor – this gives me eyes to look what is happening. My apologies for the formatting of the C main above – I need to find a better way to show source code annotations…